c
在
17
fb 一个
22
fb b
23
fb c
24
背面
EMF
SAMPLER
c
rt
19
–
+
–
+
1.5v
750nA
–
+
1.5v
750nA
v
dd
v
dd
c
rr
21
500nA
v
dd
速度
fb
20
c
VCO
15 16
右
VCO
电压
受控
振荡器
vco/tach
13
2
4
3
9
10
哈
HB
HC
洛杉矶
磅
浇口
逻辑
&放大器;
输出
驱动程序
+
–
速度 设置
8
5
速度 比较
3.9v
1.7v
20kHz
6
c
t
–
+
1.4v
1
我
感觉
×
5
UVLO
12
我
限制
–
+
1.7v
v
参考
26
c
IOS
16k
Ω
8k
Ω
我
限制
1-已拍摄
25
BRAKE
v
dd
4k
Ω
14
v
dd
28
地
27
右
参考
11
LC
参考
VCO
出点
VCO
出点
18
uv 故障
7
v
参考
一个
B
c
d
e?
f
右
换向
州 机器
july 2000
ML4425
sensorless bldc 电机 控制器
概述 描述
这 ml4425 pwm 电机 控制器 提供 全部 的 这
功能 必要的 用于 起动 和 控制 这 速度
的 三角洲 或 wye 伤口 brushless 直流 (bldc) 电机
无 通道 效果 传感器. 背面 emf 电压 是 感应到
从 这 电机 绕组 至 确定 这 适当的
换向 相位 顺序 使用 一个 pll. 这个 专利
感应 技术 将 commutate 一个 宽 范围 的 3-
相位 bldc 电机 和 是 不敏感 至 pwm 噪声 和
电机 snubbing 电路.
这 ml4425 限制 这 电机 电流 使用 一个 常数 关-
时间 pwm 控制 回路. 这 流速 回路 是 受控
与 一个 板载 放大器. 这 ml4425 有 电路 至
确保 那 那里 是 否 射穿 入点 直接 驱动
外部 电源 mosfets.
这 计时 的 这 启动 顺序 是 已确定 由 这
选择 的 三个 计时 电容器. 这个 允许
优化 用于 一个 宽 范围 的 电机 和 荷载.
特点
■
单机 操作
■
电机 开始 和 停止 与 电源 至 集成电路
■
车载 开始 顺序: 对齐
坡道
设置 速度
■
专利 背面-emf 换向 技术 提供
jitterless 扭矩 用于 最小值 “spin-up” 时间
■
板载 速度 控制 回路
■
pll 已使用 用于 换向 提供 噪声 免疫
从 pwm 尖峰, 比较 至 噪声 敏感 零
穿越 技术
■
pwm 控制 用于 最大值 效率
■
直接 场效应晶体管 驱动器 用于 12v 电机; 驱动器 高 电压
电机 与 集成电路 缓冲区 从 红外线, ixys, harris, 电源
integrations, siliconix, 等
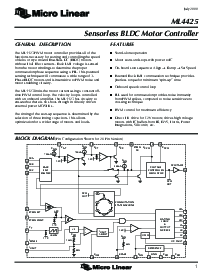
块 图表
(管脚 配置 显示 用于 28 管脚 版本)
1