7
PCM1715U
®
在 att 数据: 0xff, 输出 是 0db. 在 att 数据
0x00, 输出 是 –
∞
.
当 “muting” 是 选择 用 输出 模式 控制, 输出-
放 变得 至 –
∞
从 这 呈现 att 水平的.
移动的 速 从 0db 至 –
∞
是 1024/f.
initialized (重置) att 水平的 是 0db.
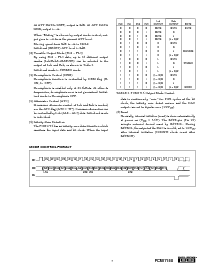
(2) 多功能的 输出 模式 [pl0 ~ pl3]
用 使用 pl0 ~ pl3 数据, 向上 至 16 不同的 输出
模式 (lch/rch/l+r/沉默的) 能 是 选择 至 这
输出 的 lch 和 rch, 作 显示 在 表格 i.
initialized 模式 是 立体的 模式.
(3) de-emphasis 控制 (dem)
de-emphasis 函数 是 控制 用 dem 标记 (h:
在, l: 止)
de-emphasis 是 使能 仅有的 在 44.1khzfs. 在 其它 fs
发生率, de-emphasis 错误 是 不 有保证的. 最初的-
ized 模式 是 de-emphasis 止.
(4) attenuator 控制 (atc)
如果 一般 attenuator 控制 的 lch 和 rch 是 需要,
使用 这 atc 标记 (atc = “h”). 一般 attenuation 能
是 控制 用 lch (al0 ~ al7) 数据. initialized 模式
是 单独的.
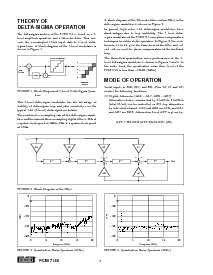
(5) infinity-零 发现
这 pcm1715 有 一个 infinity-零 发现 函数 这个
monitors 这 输入 数据 和 位 时钟. 当 这 输入
Lch Rch
PL0 PL1 PL2 PL3 输出 输出 便条
0 0 0 0 沉默的 沉默的 沉默的
0 0 0 1 沉默的 R
0 0 1 0 沉默的 L
0 0 1 1 沉默的 (l + r)/2
0 1 0 0 R 沉默的
0101 R R
0 1 1 0 R L 反转
0 1 1 1 R (l + r)/2
1 0 0 0 L 沉默的
1 0 0 1 L R 立体的
1010 L L
1 0 1 1 L (l + r)/2
1 1 0 0 (l + r)/2 沉默的
1 1 0 1 (l + r)/2 R
1 1 1 0 (l + r)/2 L
1 1 1 1 (l + r)/2 (l + r)/2 MONO
数据 是 continuously “zero” 为 8192 循环 的 这 位
时钟, 这 infinity 零 发现 occurs 和 这 dac
输出 是 设置 至 双极 零 (1/2v
CC
).
(6) 重置
正常情况下, 内部的 initialize (重置) 是 完毕 automatically
在 电源 在 (v
DD
> 3.5v). 这 rstb-管脚 (管脚 25)
accepts 外部 强迫 重置 用 rstb=l. 在
rstb=l, 这 输出 的 这 dac 是 invalid, 设置 至 1/2v
CC
之后 内部的 initialize (1024xti 时钟 计数 之后
rstb=h).
模式 控制 format
MC
AR3 AR4 AR5
MD
ML
AL0
23222120191817161514131211109876543210
AL1 AL2
AL4
AL5 AL6
AL7 AL0
AR2AR1 AR6 AR7 PL0 PL1 PL2
PL3
DEM
ATC
AL3
MSB MSBLSBLSB
表格 i. pcm1715 输出 模式 控制.