在 在
SSI
在
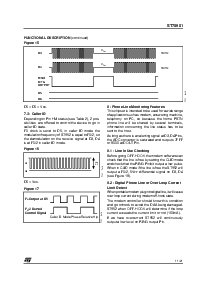
正常的 止-hook
环绕 或者
非-masked gpio
reg3 bit4 = 1
wake-向上 在 中断
环绕
PWRDWN
GPI
环绕
处理器 读 reg2
st75951 resets 位 gpi
止 止 OFFON
75951-06.eps
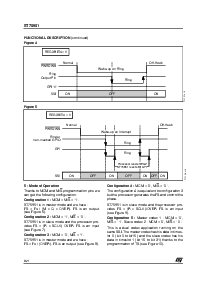
图示 5
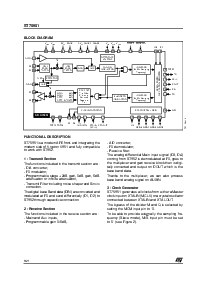
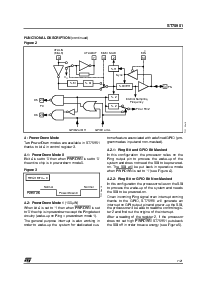
函数的 描述
(持续)
正常的 止-hook
环绕
输出 管脚
reg3 bit4 = 1
wake-向上 在 环绕
环绕
PWRDWN
gpi '1'
在 止 在
SSI
75951-05.eps
图示 4
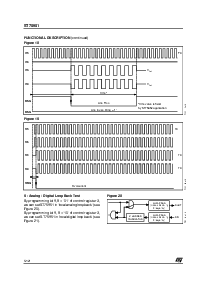
5 - 模式 的 运作
感谢 至 mcm 和 m/
s programmation 管脚 我们
能 得到 这 下列的 配置.
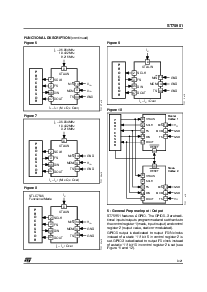
配置 1 :
mcm = m/s = ’1’.
st75951 是 在 主控 模式 和 我们 有 :
fs = f
Q
/ (m x q x 在). fs 是 一个 输出.
(看 图示 6).
配置 2 :
mcm = ’1’, m/s = ’ 0 ’.
st75951 是 在 从动装置 模式 和 这 处理器 pro-
vides fs = (r x sclk) 在. fs 是 一个 输入
(看 图示 7).
配置 3 :
mcm = ’0’, m/s = ’1’.
st75951 是 在 主控 模式 和 我们 有 :
fs = f
Q
/ (在). fs 是 一个 输出 (看 图示 8).
配置 4 :
mcm = ’0’, m/
s = ’ 0 ’.
这 配置 4 是 相等的 至 配置 3
但是 这 处理器 发生 这 fs 和 控制 这
阶段.
st75951 是 在 从动装置 模式 和 这 处理器 pro-
vides fs = (r x sclk)/在. fs 是 一个 输入
(看 图示 9).
配置 5 :
主控 codec 1 : mcm = ’0’,
m/
s = ’ 1 ’. 从动装置 codec 2 : mcm = ’0’, m/s = ’ 0 ’.
这个 是 一个 双 codec 应用 运动 在 这
一样 ssi. 这 主控 codec 有 his 数据 在 时间-
lot 0 ( 位 0 至 bit15 ) 和 这 从动装置 codec 有 his
数据 在 timeslot 1 (位 16 至 位 31) 感谢 至 这
programmation 的 ts (看 图示 10).
ST75951
8/21