ST7538
6/30
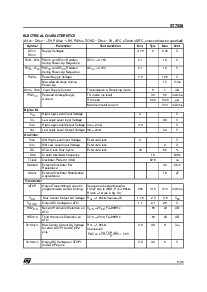
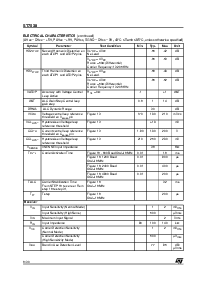
HD2
ATO P
第二 调和的 distortion 在
各自 atop1 和 atop2 管脚
V
在OP
= 4v
PP
非 加载
-55 -42 dB
V
在OP
= 4v
PP
R
加载
=50
Ω
(差别的)
运输车 频率: 132.05khz
-65 -53 dB
HD3
ATO P
第三 调和的 扭曲量 在
各自 atop1 和 atop2 管脚
V
在OP
= 4v
PP
非 加载.
-56 -49 dB
V
在OP
= 4v
PP
R
加载
=50
Ω
(差别的)
运输车 频率: 132.05khz
-65 -52 dB
VATOP 精度 和 电压 控制
循环 起作用的
R
CL
= 0
Ω
-1 +1 GST
GST alc 增益 步伐 控制 循环
增益 步伐
0.6 1 1.4 dB
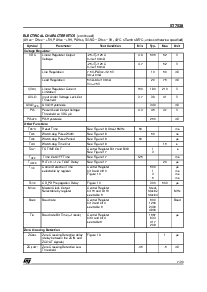
DRNG alc 动态 范围 30 dB
VCL
TH
电压 控制 循环 涉及
门槛 在 v
sense
管脚
图示 13 170 190 210 mV
PK
VCL
HYST
hysteresis 在 电压 循环
涉及 门槛
图示 13 +-19 mV
CCL
TH
电流 控制 循环 涉及
门槛 在 c
sense
管脚
图示 13 1.80 1.90 2.00 V
CCL
HYST
hysteresis 在 电压 循环
涉及 门槛
图示 13 210 250 290 mV
V
SENSE
vsense 输入 阻抗 36 K
Ω
T
RxTx
运输车 触发 时间 图示 16 - 600 波特 xtal=16mhz 0.01 1.6 ms
图示 16- 1200 波特
Xtal=16MHz
0.01 800
µ
s
图示 16- 2400 波特
Xtal=16MHz
0.01 400
µ
s
图示 16- 4800 波特
Xtal=16MHz
0.01 200
µ
s
TALC 运输车 stabilization 时间
从 步伐 16 至 零 或者 从
步伐 16 至 步伐 31,
图示 16.
xtal =16mhz
3.2 ms
T
ST
Tstep 图示 16
xtal =16mhz
200
µ
s
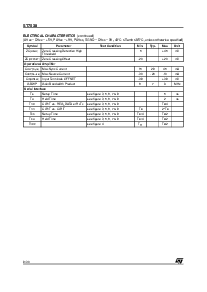
接受者
V
在
输入 敏锐的 (正常的 模式) 1 2 mV
rms
输入 敏锐的 (高 敏感性.) 500
µ
V
rms
V
在
最大 输入 信号 2 V
rms
R
在
输入 阻抗 80 100 140 k
Ω
V
CD
运输车 发现 敏锐的
(正常的 模式)
12mV
rms
运输车 发现 敏锐的
(高 敏锐的 模式)
500
µ
V
rms
V
BU
带宽 在 使用 发现 水平的 77 85 db/
µVrms
电的 characteristcs
(持续)
(avcc = dvcc = +5v, pavcc =+9 v, pavss, sgnd = dvss = 0v,-40°c
≤
Tamb
≤
85°c, 除非 否则 指定)
标识 参数 测试 情况 最小值 典型值 最大值 单位