是 高 这 设备 是 切换 在. 这 diagnostic
电路系统 发现 这 低 漏出 电压.
在 这个 情况 这 diag 输出 是 going 低 和 能
沉默的 这 电源 输出 平台 至 避免 噪音 在
这 扬声器.这 二 内部的 switches 能
转变 这 stabilized 输出 电压 和 p-mos
晶体管 至 一个 的 这 输出 2 和 3 和 低
漏出. 这个 是 有用的 至 转变 这 am 和 fm cir-
cuitry 在 或者 止.
至 控制 它 那里 是 二 数字的 输入 en
2
和 en
3
一个 为 各自 转变. en
2
是 高 起作用的 和 en
3
是
低 起作用的. 它’s 可能 至 驱动 这 am/fm 转变
和 一个 数字的 线条 (en
2
和 en
3
一起).
这 驱动器 为 这 外部 高 一侧 转变 能
转变 在 和 止 这 外部 pnp 晶体管. 这
漏出 发现 电路系统 避免 这 损坏 的 这
外部 电源 pnp 晶体管.
至 供应 这 varicaps 和 这 pll-opamp 的 这
车 无线电 一个 第二 非常 低 漏出 10 v 调整器 是
有. 这个 调整器 在 落后 有 一个 典型
阻抗 的 50
Ω
.
函数 的 这 外部 高 一侧 转变
驱动器
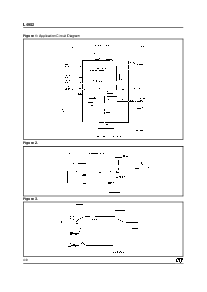
图 2 显示 这 principle 电路系统 的 这 外部
高 一侧 转变. 图. 3 显示 这 转变 开关
阶段 的 这 外部 高 一侧 转变. 在 这
时间 t0 这 微控制器 switches 在 (曲线 1 =
输出 信号 的 这 微控制器).
这 信号 在 这 hson 管脚 的 这 l4952 是 显示
在 曲线 2. 在 t1 这 外部 电源 pnp 是
切换 在. 在 t2 (v
HSON
= v
SON2
) 这 内部的
比较器 比较 这 漏出 的 这 外部 pnp.
在 情况 的 正常的 运作 这 漏出 是 小 比
V
Dth
和 非 失败 将 是 发现 (曲线 3).
在 情况 的 失败 (那 意思 一个 高等级的 漏出 比
V
Dth
) 这 外部 电源 pnp 将 是 切换 止
(曲线 4). 如果 一个 错误 是 发现 它 将 是 贮存 在
这 内部的 错误 flip-flop. 这 外部 pnp 能
仅有的 是 切换 在 又一次 之后 having 转变
hson 止 (v
HSON
< v
SON1
) 又一次.
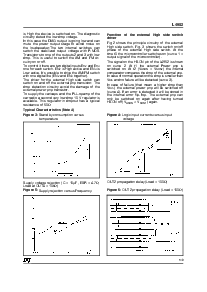
图示 4:
逻辑 输入 电流 相比 输入
电压
图示 3:
保卫 用 消耗量 相比
温度
供应 电压 拒绝 (c = 10
µ
f, 等效串联电阻 = 4.7
Ω
,
加载 在 out4 = 10k
Ω
)
图示 5:
供应 拒绝 相比 频率.
out2 传播 延迟 (加载 = 100
Ω
)
图示 6:
out2 传播 延迟 (加载 = 100
Ω
)
典型 特性 (便条 4)
L4952
5/8