3046, 3056,
和
3058
通道 效应
齿轮-齿 传感器
–zero 速
www.allegromicro.com
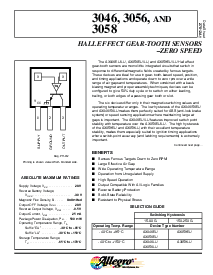
传感器 运作.
这 a3046eu/lu,
a3056eu/lu, 和 a3058eu/lu 传感器 ics
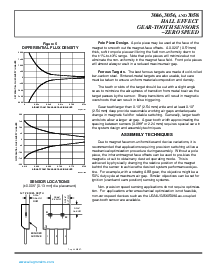
各自 包含 二 整体的 通道 transducers
(e1 和 e2) 那 是 使用 至 sense 一个 mag-
netic 地方 差别的 横过 这 面向 的 这
ic (看 s
ENSOR
L
OCATION
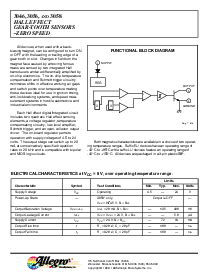
绘画). referring
至 图示 2, 这 触发 switches 这 输出
在 (输出 低) 当 b
E1
–
B
E2
> b
运算
和
switches 这 输出 止 (输出 高) 当
B
E1
–
B
E2
< b
RP
. 这 区别 在 b
运算
和 b
RP
是 这 hysteresis 的 这 设备.
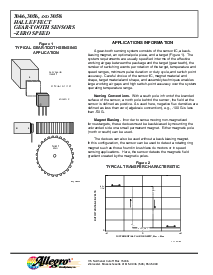
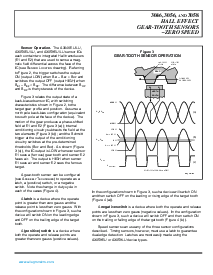
图示 3 relates 这 输出 状态 的 一个
后面的-片面的 传感器 ic, 和 切换
特性 显示 在 图示 2, 至 这
目标 齿轮 profile 和 位置. 假设 一个
北 柱子 后面的-偏差 配置 (相等的
至 南 柱子 在 这 面向 的 这 设备). 这
运动 的 这 齿轮 生产 一个 阶段-shifted
地方 在 e1 和 e2 (图示 3 (一个)); 内部的
conditioning 电路系统 subtracts 这 地方 在 这
二 elements (图示 3 (b)); 和 这 施密特
触发 在 这 输出 的 这 conditioning
电路系统 switches 在 这 前-决定
门槛 (b
运算
和 b
RP
). 作 显示 (图示
3 (c)), 这 ic 输出 是 低 whenever 传感器
e1 sees 一个 (ferrous) 齿轮 齿 和 传感器 e2
faces 空气. 这 输出 是 高 当 传感器
e1 sees 空气 和 传感器 e2 sees 这 ferrous
目标.
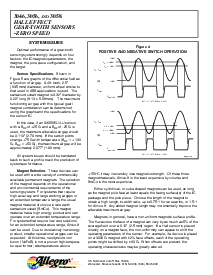
一个 齿轮-齿 传感器 能 是 配置
(看 一个
SSEMBLY
T
ECHNIQUES
) 至 运作 作 一个
获得, 一个 (积极的) 转变, 或者 一个 负的
转变. 便条 这 改变 在 职责 循环 在
各自 的 这 具体情况 (图示 4).
一个
获得
是 一个 设备 在哪里 这 运作
要点 是 更好 比 零 高斯 和 这
释放 要点 是 较少 比 零 高斯. 和
这 配置 显示 在 图示 3, 此类 一个
设备 将 转变 在 在 这 leading 边缘
和 止 在 这 trailing 边缘 的 这 目标
齿.
一个
(积极的) 转变
是 一个 设备 在哪里
两个都 这 运作 和 释放 点 是
更好 比 零 高斯 (积极的 值).
图示 3
齿轮-齿 传感器 运作
运算
b = +25 g
B
–
B
e1 e2
齿轮
4300 g
4130 g
150 g
0 g
-150 g
RP
b =
–
25 g
V
输出(sat)
V
输出
b &放大; b
e1 e2
输出 职责 循环
≈
50%
Dwg. wh-003
方向
的 旋转
LEADING
边缘
TRAILING
边缘
北
南
E2 E1
(一个)
(b)
(c)
在 这 配置 显示 在 图示 3, 此类 一个 设备 将 转变 在
和 然后 转变 止 在 这 leading 或者 rising 边缘 的 这 目标 齿
(图示 4 (一个)).
一个
负的 转变
是 一个 设备 在哪里 两个都 这 运作 和 释放
点 是 较少 比 零 高斯 (负的 值). 在 这 配置
显示 在 图示 3, 此类 一个 设备 将 转变 止 和 然后 转变 在
在 这 trailing 或者 下落 边缘 的 这 目标 齿 (图示 4 (b)).
速 传感器 能 使用 任何 的 这 三 传感器 配置
描述. 定时 传感器, 不管怎样, 必须 使用 一个 获得 至 保证
双-边缘 发现. latches 是 大多数 容易地 制造 使用 这
a3058eu 或者 a3058lu 设备 类型.