3967
microstepping 驱动器
和 翻译
www.allegromicro.com
5
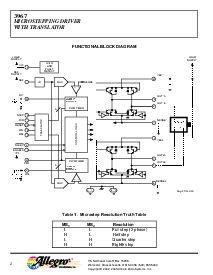
设备 运作.
这 a3967 是 一个 完全
microstepping 发动机 驱动器 和 建造 在 翻译 为
容易 运作 和 minimal 控制 线条. 它 是 设计
至 运作 双极 stepper 发动机 在 全部-, half-, quarter-
和 eighth-步伐 模式. 这 电流 在 各自 的 这 二
输出 h-bridges 是 管制 和 fixed 止 时间 脉冲波-
宽度 modulated (pwm) 控制 电路系统. 这 h-桥
电流 在 各自 步伐 是 设置 用 这 值 的 一个 外部
电流 sense 电阻 (r
S
), 一个 涉及 电压 (v
REF
), 和
这 dac’s 输出 电压 控制 用 这 输出 的 这
翻译.
在 电源 向上, 或者 重置, 这 翻译 sets 这 dacs 和
阶段 电流 极性 至 最初的 home 状态 (看 计算数量 为
home-状态 情况), 和 sets 这 电流 调整器 为
两个都 阶段 至 mixed-decay 模式. 当 一个 步伐 command
信号 occurs 在 这 步伐 输入 这 翻译 自动地-
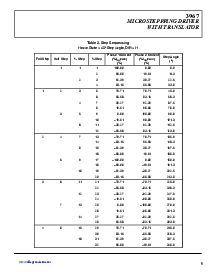
cally sequences 这 dacs 至 这 next 水平的 (看 表格 2 为
这 电流 水平的 sequence 和 电流 极性). 这
microstep 决议 是 设置 用 输入 ms
1
和 ms
2
作
显示 在 表格 1. 如果 这 新 dac 输出 水平的 是 更小的
比 这 previous 水平的 这 decay 模式 为 那 h-桥
将 是 设置 用 这 pfd 输入 (快, 慢 或者 mixed decay).
如果 这 新 dac 水平的 是 高等级的 或者 equal 至 这 previous
水平的 然后 这 decay 模式 为 那 h-桥 将 是 慢
decay. 这个 自动 电流-decay 选择 将
改进 microstepping 效能 用 减少 这
扭曲量 的 这 电流 波形 预定的 至 这 发动机
bemf.
重置 输入 (重置).
这 重置 输入 (起作用的 低)
sets 这 翻译 至 一个 predefined home 状态 (看 计算数量
为 home 状态 情况) 和 转变 止 所有 的 这 输出.
步伐 输入 是 ignored 直到 这 重置 输入 变得 高.
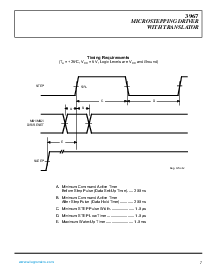
步伐 输入 (步伐).
一个 低-至-高 转变 在 这
步伐 输入 sequences 这 翻译 和 advances 这
发动机 一个 increment. 这 翻译 控制 这 输入 至
这 dacs 和 这 方向 的 电流 流动 在 各自 wind-
ing. 这 大小 的 这 increment 是 决定 用 这 状态
的 输入 ms
1
和 ms
2
(看 表格 1).
microstep 选择 (ms
1
和 ms
2
).
输入 terminals
ms1 和 ms
2
选择 这 microstepping format 每
表格 1. 改变 至 这些 输入 做 不 引领 效应 直到
这 步伐 command (看 图示).
方向 输入 (dir).
这 状态 的 这 方向
输入 将 决定 这 方向 的 旋转 的 这 发动机.
内部的 pwm 电流 控制.
各自 h-桥 是
控制 用 一个 fixed 止 时间 pwm 电流-控制 电路
那 限制 这 加载 电流 至 一个 desired 值 (i
TRIP
).
initially, 一个 diagonal 一双 的 源 和 下沉 输出 是
使能 和 电流 flows 通过 这 发动机 winding 和
R
S
. 当 这 电压 横过 这 电流-sense 电阻
相等 这 dac 输出 电压, 这 电流-sense com-
parator resets 这 pwm 获得, 这个 转变 止 这 源
驱动器 (慢-decay 模式) 或者 这 下沉 和 源 驱动器
(快- 或者 mixed-decay 模式).
这 最大 值 的 电流 限制的 是 设置 用 这
选择 的 r
S
和 这 电压 在 这 v
REF
输入 和 一个
跨导 函数 近似 用:
I
TRIP
最大值 = v
REF
/8r
S
这 dac 输出 减少 这 v
REF
输出 至 这
电流-sense 比较器 在 准确的 步伐 (看 表格 2 为
%
I
TRIP
最大值
在 各自 步伐).
I
TRIP
= (% i
TRIP
最大值/100) x i
TRIP
最大值
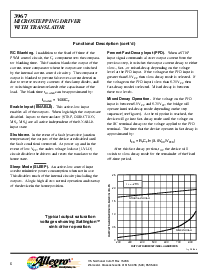
fixed 止-时间.
这 内部的 pwm 电流-控制
电路系统 使用 一个 一个 shot 至 控制 这 时间 这 驱动器(s)
仍然是(s) 止. 这 一个 shot 止-时间, t
止
, 是 决定 用
这 选择 的 一个 外部 电阻 (r
T
) 和 电容
(c
T
) 连接 从 这 rc 定时 终端 至 地面.
这 止 时间, 在 一个 范围 的 值 的 c
T
= 470 pf 至
1500 pf 和 r
T
= 12 k
Ω
至 100 k
Ω
是 近似 用:
t
止
= r
T
C
T
函数的 描述