3957
全部-桥 pwm
MICROSTEPPING
发动机 驱动器
函数的 描述
二 a3957s— 全部-桥 pwm microstepping 发动机
驱动器 是 需要 至 驱动 这 windings 的 一个 双极 stepper
发动机. 内部的 脉冲波-宽度 modulated (pwm) 控制 电路系统
regulates 各自 发动机 winding’s 电流. 这 顶峰 发动机
电流 是 设置 用 这 值 的 一个 外部 电流-sense 电阻
(r
S
), 一个 涉及 电压 (v
REF
), 和 这 数字的-至-相似物
转换器 (dac) 数据 输入 (d
0
, d
1
, d
2
, 和 d
3
).
至 改进 发动机 效能, 特别 当 使用
sinusoidal 电流 profiles 需要 为 microstepping, 这
a3957s— 有 三 distinct 电流-decay 模式: 慢 decay,
快 decay, 和 mixed decay.
阶段 输入. 这 阶段 输入 控制 这 方向 的
电流 流动 在 这 加载 (表格 1). 一个 内部 发生 dead
时间 的 大概 1.5
µ
s 阻止 转型 电流 那
可以 出现 当 切换 这 阶段 输入.
dac 数据 输入 (d
0
, d
1
, d
2
, d
3
).
一个 非-直线的 dac 是 使用
至 digitally 控制 这 输出 电流. 这 输出 的 这 dac 是
使用 至 设置 这 trip 要点 的 这 电流-sense 比较器. 表格
3 显示 dac 输出 电压 为 各自 输入 情况. 当
D
1
, d
2
, 和 d
3
是 所有 逻辑 低, 所有 的 这 电源 输出
晶体管 是 转变 止.
内部的 pwm 电流 控制.
各自 发动机 驱动器 ic
包含 一个 内部的 fixed 止-时间 pwm 电流-控制 电路
那 限制 这 加载 电流 至 一个 desired 值 (i
TRIP
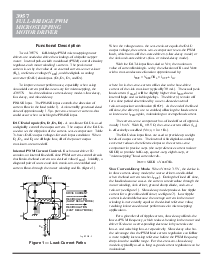
). initially, 一个
diagonal 一双 的 源 和 下沉 晶体管 是 使能 和
电流 flows 通过 这 发动机 winding 和 r
S
(图示 1).
当 这 电压 横过 这 sense 电阻 相等 这 dac
输出 电压, 这 电流-sense 比较器 resets 这 pwm
获得, 这个 转变 止 这 源 驱动器 (慢-decay 模式) 或者
这 下沉 和 源 驱动器 (快- 或者 mixed-decay 模式).
和 这 数据 输入 线条 系 至 v
CC
, 这 最大
值 的 电流 限制的 是 设置 用 这 选择 的 r
S
和 v
REF
和 一个 跨导 函数 近似 用:
I
TRIP
≈
V
REF
/3r
S
= i
输出
+ i
所以
.
在哪里 i
所以
是 这 sense-电流 补偿 预定的 至 这 根基-驱动
电流 的 这 下沉 晶体管 (典型地 30 毫安). 这 真实的 顶峰
加载 电流 (i
顶峰
) 将 是 slightly 高等级的 比 i
TRIP
预定的 至
内部的 逻辑 和 切换 延迟. 这 驱动器(s) 仍然是 止
为 一个 时间 时期 决定 用 一个 用户-选择 外部
电阻-电容 结合体 (r
T
C
T
). 在 这 终止 的 这 fixed
止 时间, 这 驱动器(s) 是 re-使能, 准许 这 加载 电流
至 增加 至 i
TRIP
又一次, 维持 一个 平均 加载 电流.
这 电流-sense 比较器 有 一个 fixed 补偿 的 approxi-
mately 16 mv. 和 r
S
= 0.5
Ω
, 这 sense-电流 补偿 (i
所以
)
是 effectively cancelled (v
io(s)
≈
I
所以
• r
S
).
这 dac 数据 输入 线条 是 使用 至 提供 向上 至 第八
水平 的 输出 电流. 这 内部的 4-位 数字的-至-相似物
转换器 减少 这 涉及 输入 至 这 电流-sense
比较器 在 准确的 步伐 (这 步伐 涉及 电流 比率 或者
srcr) 至 提供 half-步伐, quarter-步伐, eighth-步伐, 或者
“microstepping” 加载-电流 水平.
I
TRIP
≈
srcr x v
REF
/3r
S
慢 电流-decay 模式.
当 v
PFD
≥
3.5 v, 这 设备 是
在 慢 电流-decay 模式 (这 源 驱动器 是 无能
当 这 加载 电流 reaches i
TRIP
). 在 这 fixed 止 时间,
这 加载 电感 导致 这 电流 至 recirculate 通过 这
发动机 winding, 下沉 驱动器, 地面 clamp 二极管, 和 sense
电阻 (看 图示 1). 慢-decay 模式 生产 低 波纹
电流 为 一个 给 fixed 止 时间 (看 图示 2). 低 波纹
电流 是 desirable 因为 这 平均 电流 在 这 发动机
winding 是 更多 nearly equal 至 这 desired 涉及 值,
结果 在 增加 发动机 效能 在 microstepping
产品.
为 一个 给 水平的 的 波纹 电流, 慢 decay affords 这
最低 pwm 频率, 这个 减少 加热 在 这 发动机 和
驱动器 ic 预定的 至 一个 相应的 decrease 在 hysteretic 核心
losses 和 切换 losses 各自. 慢 decay 也 有
这 有利因素 那 这 pwm 加载 电流 规章制度 能 follow
一个 更多 迅速 增加 涉及 在之前 这 pwm 频率
drops 在 这 audible 范围. 为 这些 reasons 慢-decay
模式 是 典型地 使用 作 长 作 好的 电流 规章制度 能 是
maintained.
图示 1 — 加载-电流 paths
dwg. ep-006-15
R
S
BB
V
驱动 电流
RECIRCULATION
(慢-decay 模式)
RECIRCULATION
(快-decay 模式)