A6130
这 看门狗 计时器 resets 和 是 定义 用 T
CW
=T
WD
-
owp(t
WD
).这 打开 window 开始 之后 这 关闭 时间
window finishes 和 lasts till T
WD
+ owp(t
WD
). 这 打开
window 时间 是 定义 用 T
OW
= 2 x owp(t
WD
).
为 例子 如果 T
WD
= 100 ms (真实的 值) 和 OWP = ±
20% 这个 意思 这 关闭 window lasts 在 第一 这
80 ms (t
CW
= 80 ms = 100 ms - 0.2 (100 ms)) 和 这
打开 window 这 next 40 ms (t
OW
= 2 x 0.2 (100 ms) = 40
ms). 这 看门狗 能 是 serviced 在 80 ms 和
120 ms 之后 这 计时器 重置. 不管怎样 作 这 时间 根基 是
± 10% 精确, 软件 必须 使用 这 下列的 calcula
-
tion 为 servicing 信号 TCL
在 这 打开 window:
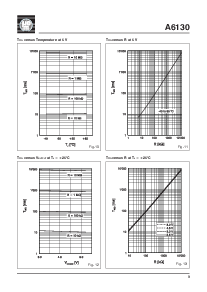
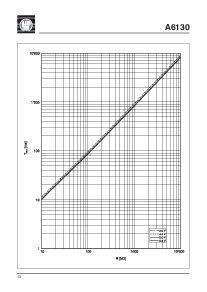
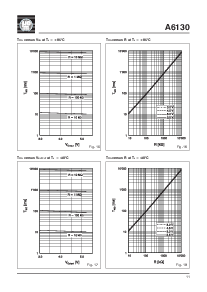
Related 至 曲线 (图. 10 至 图. 20), 特别 图. 19
和 图. 20, 这 relation 在 T
WD
和 R
EXT
可以 eas
-
ily 是 定义. Let 美国 引领 一个 例子 描述 这 vari
-
ations 预定的 至 生产 和 温度:
1. 选择, T
WD
=26ms.
2. Related 至 图. 20, 这 系数 (t
WD
至 R
EXT
) 是 1.125
在哪里 R
EXT
是 在 k
和 T
WD
在 ms.
3. R
EXT
(典型值.) = 26 x 1.125 = 29.3 k
.
4.
这 比率 在 T
WD
= 26 ms 和 这 (tcl 时期)
= 25.4 ms 是 0.975.
然后 这 relation 在 这 生产 和 这 全部
温度 范围 是 TCL
时期 = 0.975 x T
WD
或者
TCL
时期 =
0.975 x R
EXT
1.125
, 作 典型 值.
一个) 当 生产 值 unknown 为 这
客户 当 R
EXT
118 k
.
b) 当 运行 温度 范围 -40°c
T
J
+85°c.
5. 如果 你 fixed 一个 TCL
时期 = 26 ms
R
EXT
=
26 x 1.125
0.975
=30k
如果 在 your 生产 这 T
WD
时间 能 是 mea
-
sured 在 T
J
= +25°C 和 这 µC 能 调整 这 TCL pe
-
riod, 然后 这 TCL
时期 范围 将 是 更 大 为
这 全部 运行 温度.
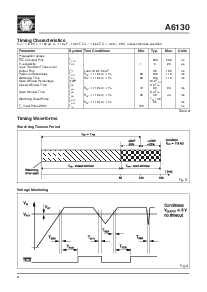
计时器 Clearing 和 RES Action
这 看门狗 电路 monitors 这 activity 的 这 proces
-
sor. 如果 这 user’s 软件 做 不 send 一个 脉冲波 至 这
TCL
输入 在里面 这 编写程序 打开 window timeout
时期 一个 短的 看门狗 RES
脉冲波 是 发生 这个 是
equal 至 T
WD
/ 40 = 2.5 ms 典型地 (看 图. 5).
和 这 打开 window constraint 新 安全 是 增加 至
常规的 watchdogs 用 monitoring 两个都 软件 cy
-
cle 时间 和 执行. 应当 软件 clear 这 watch
-
dog too quickly (incorrect 循环 时间) 或者 too 慢速地
(incorrect 执行) 它 将 导致 这 系统 至 是 重置. 如果
软件 是 stuck 在 一个 循环 这个 包含 这 routine 至
clear 这 看门狗 然后 一个 常规的 看门狗 将
不 制造 一个 系统 重置 甚至 though 软件 是 mal
-
起作用; 这 A6130 将 制造 一个 系统 重置 是
-
导致 这 看门狗 将 是 cleared too quickly.
如果 非 TCL
信号 是 应用 在之前 这 关闭 和 打开
windows expire, RES
将 开始 至 发生 正方形的 waves
的 时期 (t
CW
+T
OW
+T
WDR
). 这 看门狗 将 仍然是 在
这个 状态 直到 这 next TCL
下落 边缘 呈现 在
一个 打开 window, 或者 直到 一个 fresh 电源-向上 sequence. 这
系统 使能 输出, EN
, 能 是 使用 至 阻止 核心的
控制 功能 正在 使活动 在 这 事件 的 这 sys
-
tem going 在 这个 失败 模式 (看 部分 “Enable - EN
输出"). 这 RES 输出 必须 是 牵引的 向上 至 V
输出
甚至 如果 这 输出 是 不 使用 用 这 系统 (看 图. 8).
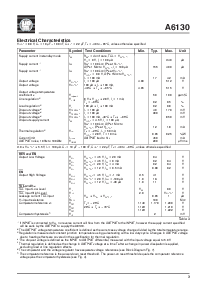
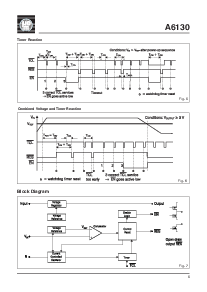
联合的 电压 和 计时器 Action
这 结合体 的 电压 和 计时器 actions 是 illus
-
trated 用 这 sequence 的 events 显示 在 图. 6. 在
电源-向上, 当 这 电压 在 V
在
reaches V
REF
, 这
电源-在-重置, por, 延迟 是 initialized 和 holds RES
起作用的 为 这 时间 的 这 POR 延迟. 一个 TCL 脉冲波 将 有
非 效应 直到 这个 电源-在-重置 延迟 是 完成.
当 这 风险 exists 那 TCL
temporarily floats, e.g. dur-
ing T
POR
, 一个 拉-向上 至 V
DD
是 必需的 在 那 管脚. 之后 这
POR 延迟 有 消逝, RES
变得 inactive 和 这
看门狗 计时器 开始 行为. 如果 非 TCL
脉冲波 occurs, RES
变得 起作用的 低 为 一个 短的 时间 T
WDR
之后 各自 关闭
和 打开 window 时期. 一个 TCL
脉冲波 coming 在 这
打开 window clears 这 看门狗 计时器. 当 这 TCL
脉冲波 occurs too early (在 这 关闭 window), RES
变得 起作用的 和 一个 新 timeout sequence 开始. 一个 电压
漏出 在下 这 V
REF
水平的 为 变长 比 典型地 5 µs
overrides 这 计时器 和 立即 forces RES
起作用的
和 EN
inactive. 任何 更远 TCL 脉冲波 有 非 效应 直到
这 next 电源-向上 sequence 有 完成.
使能 - EN 输出
这 系统 使能 输出, en, 是 inactive 总是 当
RES
是 起作用的 和 仍然是 inactive 之后 一个 RES 脉冲波 直到
这 看门狗 是 serviced correctly 3 consecutive 时间
(ie. 这 TCL
脉冲波 必须 来到 在 这 打开 window). 之后
三 consecutive 维护 的 这 看门狗 和 TCL
dur
-
ing 这 打开 window, 这 EN
变得 起作用的 低. 一个 malfunc
-
tioning 系统 将 是 repeatedly 重置 用 这
看门狗. 在 一个 常规的 系统 核心的 发动机 con
-
trols 可以 是 energized 各自 时间 重置 变得 inactive
(时间 允许 为 这 系统 至 重新开始) 和 在 这个 方法 这
电的 发动机 驱动 用 这 系统 可以 函数 输出
的 控制. 这 A6130 阻止 这 在之上 失败 模式 用
使用 这 EN
输出 至 使不能运转 这 发动机 控制 直到
软件 有 successfully cleared 这 看门狗 三
时间 (ie. 这 系统 有 correctly restarted 之后 一个 重置
情况).
7