8902–A
3-阶段 brushless 直流
发动机 控制/驱动器
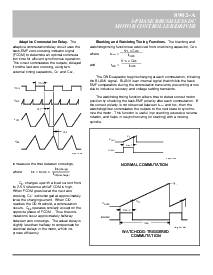
blanking 和 看门狗 定时 功能.
这 blanking 和
看门狗 定时 功能 是 获得 从 一个 定时 电容, c
WD
.
在哪里 t
BLANK
=
和 t
WD
=
这 cwd 电容 begins charging 在 各自 commutation, 初始的
这 blank 信号. blank 是 一个 内部的 信号 那 inhibits 这 后面的-
emf comparators 在 这 commutation 过往旅客, 阻止 errors
预定的 至 inductive 恢复 和 电压 安排好 过往旅客.
这 看门狗 定时 函数 准许 时间 至 发现 准确无误的 发动机
位置 用 checking 这 后面的-emf 极性 之后 各自 commutation. 如果
这 准确无误的 极性 是 不 observed 在 t
BLANK
和 t
WD
, 然后 这
看门狗 计时器 commutates 这 输出 至 这 next 状态 至 synchro-
nize 这 发动机. 这个 函数 是 有用的 在 阻止 过度的 反转
旋转, 和 helps 在 resynchronizing (或者 开始) 和 一个 移动的
spindle.
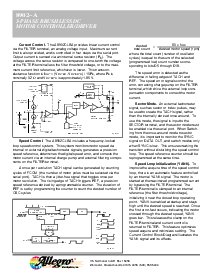
adaptive commutation 延迟.
这
adaptive commutation 延迟 电路 使用 这
后面的-emf 零-越过 指示信号 信号
(fcom) 至 决定 一个 最优的 commuta-
tion 时间 为 效率高的 同步的 运作.
这个 电路 commutates 这 输出, delayed
从 这 last 零 越过, 使用 二
外部 定时 电容, c
D1
和 c
D2
,
至 measure 这 时间 在 crossings.
在哪里 t
CD
= t
FCOM
x
C
D1
charges 向上 和 一个 fixed 电流 从
它的 2.5 v 涉及 当 fcom 是 高.
当 fcom 变得 低 在 这 next 零
越过, c
D1
是 释放 在 大概
两次 这 charging 电流. 当 cd
1
reaches 这 cd 门槛, 一个 commutation
occurs. c
D2
运作 similarly 除了 在 这
opposite 阶段 的 fcom . 因此 这 com-
mutations 出现 大概 halfway
在 零 crossings. 这 真实的 延迟 是
slightly 较少 比 halfway 至 compensate 为
电的 延迟 在 这 发动机, 这个 im-
proves 效率.
dwg. wp-016-2
FCOM
t
FCOM
t
CD1
V
CWD
V
CD1
V
CD2
t
CD2
V
TL
x c
WD
I
CWD
V
TH
x c
WD
I
CWD
看门狗-triggered
COMMUTATION
t
BLANK
dwg. wp-022
BLANK
CWD
V
V
TL
正常的 commutation
t
BLANK
t
WD
V
TL
V
TH
dwg. wp-021
BLANK
CWD
V
I
cd(承担)
I
cd(释放)