8980
S
UPER
S
ERVO
™
spindle &放大; voice-coil
actuation manager/驱动器
notch 过滤.
这个 notch 过滤 有 一个 可编程序的 中心
频率 和 可编程序的 notch depth 至 提供 truly 独立
控制 的 notch damping. 足够的 范围 和 granularity 是 提供
至 准许 多功能的 和 精确 输出-的-带宽 attenuation 的 不想要的
活力 来源.
actuator 跨导 放大器.
这 最终 trans-
conductance 函数 的 这 voice-coil actuation 信号 path 是
达到 用 monitoring 这 加载 电流 和 generating 一个 错误
电压 至 驱动 一个 local g
m
放大器 控制 循环. 这 错误 电压 是
scaled 用 一个 外部 精确 电阻 (r
gm(act)
). 这个 电阻 做
不 carry 加载 电流 和 是 将 仅有的 为 精确 determination
的 这 跨导. 这 函数 是:
g
m(act)
= 一个/v
和 I
输出
= v
伺服
•
g
m(act)
.
actuator 电源 输出.
这 voice-coil 输出 驱动器 是 一个
全部-桥 电源 驱动器 运行 在 一个 类-b 模式. 这 电源
输出 设备 是 增强-模式 mos 晶体管. 特定的
内部的 电路系统 结果 在 nearly 零 交叉-在 扭曲量 当
切换 从 一个 源/下沉 一双 至 另一.
函数的 描述
ACTUATOR
伺服-要求 dac.
一个 12-位 dac
是 提供 至 桥 这 dsp
“
软
”
domain
至 这 相似物 硬件 domain. 这 期
“
要求
”
谈及 至 这 distinction 在
这 newly 要求 voice-coil 电流 和
这 较早的 电流 正在 有提供的. 这 dac,
运行 在 笔直地 二进制的 format, spans 这
全部 动态 范围 在 一个 大 信号
velocity 和 一个 精确 位置 模式. 这
dac 输出 是 updated synchronously 和
这 notch 功能 至 避免 这 creation 的
aliasing 产品.
低-通过 过滤.
这个 翻倍, 非-
intrinsic complex-柱子 低-通过 过滤 是
提供 至 attenuate 不想要的, 输出-的-
带宽 信息. 这 输入 的 这个 分离的
时间 过滤 是 抽样 synchronously 和 这
12-位 dac 和 notch 函数 在 顺序 至
避免 aliasing 产品.
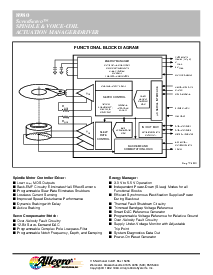
V
M
V
boost(h)
V
boost(l)
v + v
下面-电压
故障
V
boost(h)
V
boost(l)
SPINDLE
发动机 驱动器
V
boost(h)
V
boost(l)
voice-coil
驱动器
trip adj
电源
在
重置
POR
输出
ref(x2)
V
REF
V
涉及
调整
V
boost(l)
V
boost(l)
调整
(从 串行 接口)
V
V
boost(l)
T
J
关闭 /
睡眠
直流 m
cc(一个)
V
cc(一个)
V
cc(d)
V
cc(pwr)
cc(一个)
V
L
FLYBACK
cc(一个)
V
BG
V
BG
V
BG
V
V
直流
在 -
VELOCITY
故障
RETRACT
模式
V
cc(一个)
REF
v +
V
REF
2
VEL
FILTERED
V
REF
v -
V
REF
2
V
cc(d)
V
RETRACT
BG
V
调整
(从 串行
接口)
x2
÷
2
BANDGAP
电压
涉及
直流-至-直流
转换器
热的
故障
RETRACT
电压
涉及
R
gm(act)
5800