8980
S
UPER
S
ERVO
™
spindle &放大; voice-coil
actuation manager/驱动器
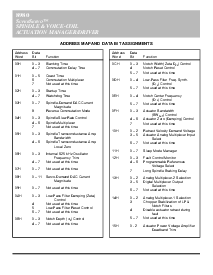
地址 编排 和 数据 位 assignments
地址 数据
文字 位 函数
00H 0
–
3 blanking 时间
4
–
7 commutation 延迟 时间
01H 0
–
5 coast 时间
6 commutation 多路调制器
7 不 使用 在 这个 时间
02H 0
–
3 startup 时间
4
–
7 看门狗 时间
03H 0
–
7 spindle-要求 dac 电流
巨大
8 反转 commutation 模式
04H 0
–
3 spindle 回转 比率 控制
4
–
6 spindle 多路调制器
7 不 使用 在 这个 时间
05H 0
–
3 spindle 跨导 放大.
带宽
4
–
6 spindle 跨导 放大.
local 零
06H 0
–
3 内部的 6.25 khz 振荡器
频率 修整
4
–
7 不 使用 在 这个 时间
07H 0
–
7 不 使用 在 这个 时间
08H 0
–
11 伺服-要求 dac 电流
巨大
09H 0
–
7 不 使用 在 这个 时间
0AH 0
–
3 低-通过 过滤 damping (zeta)
控制
4 不 使用 在 这个 时间
5 低-通过 过滤 重置 控制
6
–
7 不 使用 在 这个 时间
0BH 0
–
3 notch depth (
α
3
) 控制
4
–
7 不 使用 在 这个 时间
地址 数据
文字 位 函数
0CH 0
–
3 notch 宽度 (zeta d
Z3
) 控制
4 notch 重置 控制
5
–
7 不 使用 在 这个 时间
0DH 0
–
4 低-通过 过滤 freq. synth.
(d
n2
) 控制
5
–
7 不 使用 在 这个 时间
0EH 0
–
4 notch 中心 频率
(d
n3
) 控制
5
–
7 不 使用 在 这个 时间
0FH 0
–
3 actuator 带宽
(bw
ACT
) 控制
4
–
6 actuator 零 (damping) 控制
7 不 使用 在 这个 时间
10H 0
–
2 retract velocity 要求 电压
3
–
5 actuator 相似物 多路调制器 输入
选择
6
–
7 不 使用 在 这个 时间
11H 0
–
7 睡眠 模式 manager
12H 0
–
3 故障 控制 监控
4
–
6 可编程序的 references
电压 选择
7 长 spindle 用闸减速 延迟
13H 0
–
2 相似物 多路调制器-2 选择
3
–
5 数字的 多路调制器 输出
选择
6
–
7 不 使用 在 这个 时间
14H 0
–
2 相似物 多路调制器-1 选择
3 chopper stabilization 的 lp &放大;
notch 过滤
4 使不能运转 actuator retract 在
故障
5
–
7 不 使用 在 这个 时间
15H 0 - 2 actuator 电源 电压 放大器
deadband 修整