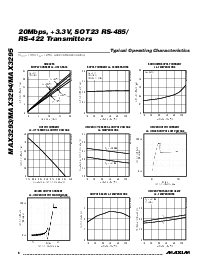
驱动器 传播 延迟
max3293-95 toc10
20ns/div
y, z: 1v/div
di: 2v/div
DI
0V
0V
y, z
Typical 运行 特性 (持续)
(v
CC
= +3.3v, t
一个
= +25°c, 除非 否则 指出.)
max3293/max3294/max3295
20mbps, +3.3v, sot23 rs-485/
rs-422 传输者
_______________________________________________________________________________________
7
使能 回馈 时间
max3293-95 toc11
40ns/div
DE
0V
0V
y-z
y, z, de: 2v/div
unloaded 驱动器 输出
波形 (f
在
= 16mbps)
max3293-95 toc12
20ns/div
y, z: 1v/div
0V
y, z
承载 驱动器 输出 波形
(f
在
= 16mbps)
max3293-95 toc13
20ns/div
y, z: 500mv/div
0V
y, z
eye 图解 (f
在
= 20mbps)
max3293-95 toc14
10ns/div
y, z: 500mv/div
0V
y, z
管脚 描述
管脚 名字 函数
1DI
驱动器 输入. 一个 逻辑 低 在 di forces 这 同相 输出 (y) 低 和 这 反相的 输出 (z)
高. 一个 逻辑 高 在 di forces 这 同相 输出 (y) 高 和 这 反相的 输出 (z) 低.
2V
CC
积极的 供应. v
CC
= +3.3v ±5%. 绕过 v
CC
至 地 和 一个 0.1µf 电容.
3DE
驱动器 输出 使能. 强迫 de 高 至 使能 驱动器. 拉 de 低 至 使不能运转 这 驱动器. hot-swap
输入, 看 这
hot-swap 能力
部分.
4Z反相的 rs-485/rs-422 输出
5 地 地面
6Y同相 rs-485/rs-422 输出