BD7905BFS
视力的 disc ics
4/17
!
!!
!
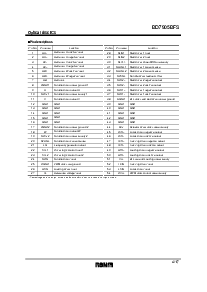
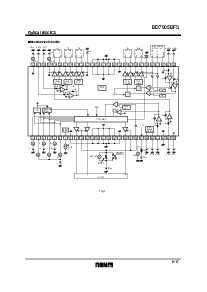
管脚 描述
管脚 非. 管脚 名字 函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
HU
+
HU
−
HV
+
HV
−
HW
+
HW
−
HB
PGND1
U
SPV
M
1
V
地
地
地
地
地
PGND2
W
SPV
M
2
SPRNF
FG
CTL1
CTL2
SPIN
DGND
LDIN
V
C
管脚 非. 管脚 名字 函数
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
SLIN1
SLIN2
SLV
DD
SLRNF1
SLRNF2
SPCNF
SLO2
−
SLO2
+
SLO1
−
SLO1
+
AGND
地
地
地
地
地
AV
M
FCO
−
FCO
+
TKO
−
TKO
+
LDO
−
LDO
+
V
CC
TKIN
FCIN
DV
CC
通道 放大. u 积极的 输入
通道 放大. u 负的 输入
通道 放大. v 积极的 输入
通道 放大. v 负的 输入
通道 放大. w 积极的 输入
通道 放大. w 负的 输入
通道 偏差
spindle 驱动器 电源 地面 1
spindle 驱动器 输出 u
spindle 驱动器 电源 供应 1
spindle 驱动器 输出 v
地
地
地
地
地
spindle 驱动器 电源 地面 2
spindle 驱动器 输出 w
spindle 驱动器 电源 供应 2
spindle 驱动器 电流 sense
频率 发生器 输出
驱动器 逻辑 控制 输入 1
驱动器 逻辑 控制 输入 2
spindle 驱动器 输入
pwm 块 前-地面
加载 驱动器 输入
涉及 电压 输入
sled 驱动器 1 输入
sled 驱动器 2 输入
sled 驱动器 powermos 前-供应
sled 驱动器 1 电流 sense
sled 驱动器 2 电流 sense
spindle 驱动器 反馈 过滤
sled 驱动器 2 负的 输出
sled 驱动器 2 积极的 输出
sled 驱动器 1 负的 输出
sled 驱动器 1 积极的 输出
btl 块 和 sled 驱动器 电源 地面
地
地
地
地
地
actuator 驱动器 块 电源 供应
focus 驱动器 负的 输出
focus 驱动器 积极的 输出
追踪 驱动器 负的 输出
追踪 驱动器 积极的 输出
加载 驱动器 负的 输出
加载 驱动器 积极的 输出
btl 前 和 加载 电源 供应
追踪 驱动器 输入
focus 驱动器 输入
pwm 块 控制 电源 供应
∗
积极的/负的 的 这 输出 terminals 是 决定 在 涉及 至 那些 的 这 输入 terminals.