BD7905BFS
视力的 disc ics
6/17
!
!!
!
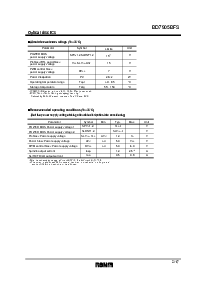
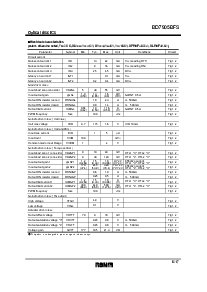
电的 特性
(除非 否则 指出, ta=25
°
c, slv
DD
=V
CC
=12v, dv
CC
=AV
M
=5v, v
C
=1.65v, sprnf=0.22
Ω
, slrnf=0.5
Ω
)
IQ1
IQ2
IQ3
IST1
IST2
VDZSL
gmSL
RONUSL
RONLSL
ILIMSL
fosc
VHB
IHIB
VHIM
VHICM
VDZSP1
VDZSP2
gmSP1
gmSP2
RONUSP
RONLSP
ILIMSP1
ILIMSP2
fosc
VFGH
VFGL
VOFFT
VOHFT
VOLFT
GVFT
−
−
−
−
−
5
1.0
(0.50)
−
−
0.84
(0.42)
−
0.7
−
100
1
0
0
1.2
(0.264)
170
(37.4)
−
−
1.2
(0.264)
300
(66.0)
−
−
−
−
70
−
−
17.7
13
9
2.5
−
0.2
30
1.3
(0.65)
1.8
0.8
1.0
(0.50)
100
1.15
1
−
−
10
30
1.5
(0.33)
245
(53.9)
0.6
0.25
1.5
(0.33)
440
(96.8)
100
4.9
0.1
0
0.45
0.45
19.5
22
16
4.5
0.1
0.4
55
1.6
(0.8)
2.3
1.4
1.16
(0.58)
−
1.6
5
−
4
40
120
1.8
(0.396)
320
(70.4)
1.0
0.5
1.8
(0.396)
580
(127.6)
−
−
−
70
0.8
0.8
21.3
毫安
毫安
毫安
毫安
毫安
mV
一个/v
(v/v)
Ω
Ω
一个
(v)
kHz
V
µ
一个
mV
PP
V
mV
mV
arms/v
(电压有效值/v)
marms/v
(mvrms/v)
Ω
Ω
一个
(v)
毫安
(mv)
kHz
V
V
mV
V
V
dB
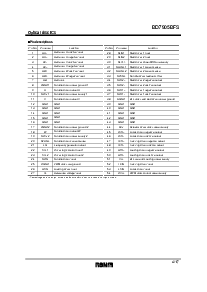
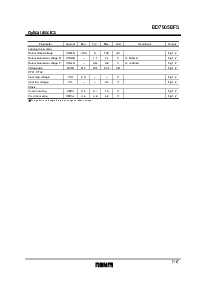
参数
标识 最小值 典型值 最大值 单位 情况 电路
V
CC
(加载 止)
V
CC
(加载 在)
DV
CC
V
CC
DV
CC
SLRNF
=
0.5
Ω
IL
=
500mA
IL
=−
500mA
SLRNF
=
0.5
Ω
IHB
=
10mA
CTL1
=
"h", ctl2
=
"h"
CTL1
=
"l", ctl2
=
"h"
有效的 电流
CTL1
=
"h", ctl2
=
"h"
有效的 电流
CTL1
=
"l", ctl2
=
"h"
IL
=
500mA
IL
=−
500mA
CTL1
=
"h", ctl2
=
"h"
CTL1
=
"l", ctl2
=
"h"
IL
=
500mA
IL
=−
500mA
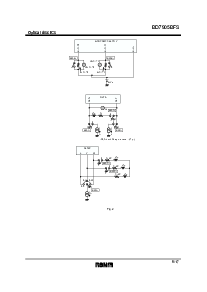
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
fig1, 2
电路 电流
安静的 电流 1
安静的 电流 2
安静的 电流 3
stanby-在 电流 1
stanby-在 电流 2
sled 驱动器 块
输入 dead zone (一个 一侧)
输入 输出 增益
输出 在 电阻 (upper)
输出 在 电阻 (更小的)
输出 限制 电流
pwm 频率
spindle 驱动器 块
〈
通道 偏差
〉
通道 偏差 电压
spindle 驱动器 块
〈
通道 放大器
〉
输入 偏差 电流
输入 水平的
一般 模式 输入 范围
spindle 驱动器 块
〈
torque 控制
〉
输入 dead zone 1 (一个 一侧)
输入 dead zone 2 (一个 一侧)
输入 输出 增益 1
输入 输出 增益 2
输出 在 电阻 (upper)
输出 在 电阻 (更小的)
输出 限制 电流 1
输出 限制 电流 2
pwm 频率
spindle 驱动器 块
〈
fg 输出
〉
高 电压
低 电压
actuator 驱动器 块
输出 补偿 电压
输出 饱和 电压 "h"
输出 饱和 电压 "l"
电压 增益
这个 产品 是 不 设计 为 保护 相反 redioactive rays.