第二 区别 (
∆
2
v)
第二 区别 是 一个 Unitrode 专卖的 algorithm
那 accumulates 这 区别 在 successive sam
-
ples 的 V
BAT
. 这 bq2031 takes 一个 样本 和 制造 一个
末端 decision 在 一个 频率 equal 至 0.008
*
t
MTO
. 快 承担 terminates 当 这 accumulated dif
-
ference 是
≤
-8mv. 第二 区别 是 使用 仅有的 在 这
二-步伐 电流 algorithm, 和 是 主题 至 一个 支撑-止
时期 (看 在下).
最大 电压
快 承担 terminates 当 V
CELL
≥
V
BLK
.v
BLK
是 设置
每 等式 2. 最大 电压 是 使用 为 快 承担
末端 在 这 二-步伐 电流 和 搏动 Cur
-
rent algorithms, 和 为 转变 从 阶段 1 至
阶段 2 在 这 二-步伐 电压 algorithm. 这个 crite
-
rion 是 主题 至 一个 支撑-止 时期.
支撑-止 时期
最大 V 和
∆
2
V 末端 criteria 是 主题
至 一个 支撑-止 时期 在 这 开始 的 快 承担 equal 至
0.15
*
t
MTO
. 在 这个 时间, 这些 末端 criteria
是 ignored.
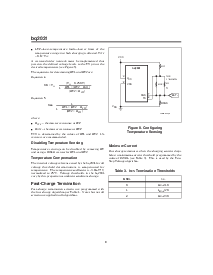
最大 时间-输出
快 承担 terminates 如果 这 编写程序 MTO 时间 是
reached 没有 一些 其它 末端 关闭 止
快 承担. MTO 是 编写程序 从 1 至 24 小时 用
一个 r-c 网络 在 TMTO (看 图示 9) 每 这 equa-
tion:
等式 6
t
MTO
= 0.5
*
R
*
C
在哪里 R 是 在 k
Ω
, C 是 在
µ
f, 和 t
MTO
是 在 小时. Typi
-
cally, 这 最大 值 为 C 的 0.1
µ
F 是 使用.
快-承担 末端 用 MTO 是 一个 故障 仅有的 在 这
搏动 电流 algorithm; 这 bq2031 enters 这 故障
状态 和 waits 为 一个 新 电池 嵌入, 在 这个
时间 它 begins 一个 新 承担 循环. 在 这 二-步伐 Volt
-
age 和 二-步伐 电流 algorithms, 这 bq2031 tran
-
sitions 至 这 maintenance 阶段 在 MTO 时间-输出.
这 MTO 计时器 开始 在 这 beginning 的 快 承担. 在
这 二-步伐 电压 algorithm, 它 是 cleared 和 re
-
started 当 这 bq2031 transitions 从 阶段 1 (cur
-
rent 规章制度) 至 阶段 2 (电压 规章制度). 这
MTO 计时器 是 suspended (但是 不 重置) 在 这 输出-
的-范围 温度 (承担 pending) 状态.
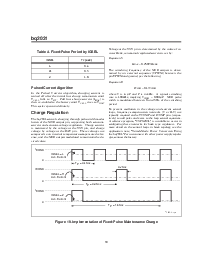
maintenance charging
三 algorithms 是 使用 在 maintenance charging:
二-步伐 电压 algorithm
二-步伐 电流 algorithm
搏动 电流 algorithm
二-步伐 电压 Algorithm
在 这 二-步伐 电压 algorithm, 这 bq2031 提供
承担 maintenance 用 regulating charging 电压 至
V
FLT
. 承担 电流 在 maintenance 是 限制 至
I
COND
.
二-步伐 电流 Algorithm
Maintenance charging 在 这 二-步伐 电流 Algo
-
rithm 是 执行 用 varying 这 时期 (t
P
)ofa
fixed 电流 (i
COND
=I
最大值
/5) 和 持续时间 (0.2 秒
-
onds) 脉冲波 至 达到 这 配置 平均 mainte
-
nance 电流 值. 看 图示 10.
Maintenance 电流 能 是 计算 用:
等式 7
Maintenance 电流
I
T
I
T
COND
P
最大值
P
=
∗
=
∗
(( . ) ) (( . ) )02 004
在哪里 T
P
是 这 时期 的 这 波形 在 秒.
表格 4 给 这 值 的 P 编写程序 用 igsel.
9
bq2031
TM
fg203112.eps
V
CC
V
SS
bq2031
12
13
1
V
SS
V
CC
C
R
图示 9. r-c 网络 为 设置 MTO