– 4 –
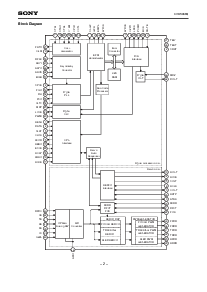
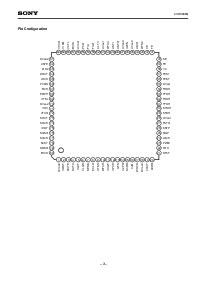
CXD3068Q
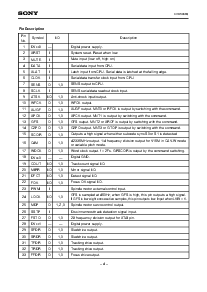
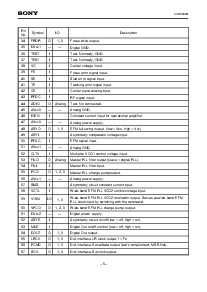
管脚 描述
管脚
非.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
—
I
I
I
I
I
O
I
i/o
O
O
O
O
O
O
O
O
—
i/o
i/o
i/o
i/o
I
i/o
O
I
O
—
O
O
O
O
O
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
—
1, 0
1, 0
1, 0
1, 0
1, 0
1, z, 0
1, 0
—
1, 0
1, 0
1, 0
1, 0
1, 0
数字的 电源 供应.
系统 重置. 重置 当 低.
沉默的 输入 (低: 止, 高: 在)
串行 数据 输入 从 cpu.
获得 输入 从 cpu. 串行 数据 是 latched 在 这 下落 边缘.
串行 数据 转移 时钟 输入 从 cpu.
敏感性 输出 至 cpu.
敏感性 串行 数据 读出 时钟 输入.
反对-shock 输入/输出.
wfck 输出.
xugf 输出. mnt0 或者 rfck 是 输出 用 切换 和 这 command.
xpck 输出. mnt1 是 输出 用 切换 和 这 command.
gfs 输出. mnt2 或者 xrof 是 输出 用 切换 和 这 command.
g2po 输出. mnt3 或者 gtop 是 输出 用 切换 和 这 command.
输出 一个 高 信号 当 也 subcode 同步 s0 或者 s1 是 发现.
4.2336mhz 输出. 1/4 频率 分隔 输出 为 v16m 在 cav-w 模式
或者 能变的 程度 模式.
文字 时钟 输出. f = 2fs. grscor 是 输出 用 这 command 切换.
数字的 地.
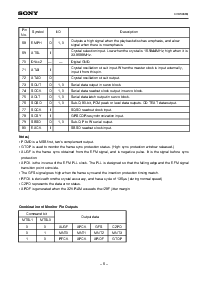
追踪 计数 信号 i/o.
mirror 信号 i/o.
发现 信号 i/o.
focus ok 信号 i/o.
spindle 发动机 外部 控制 输入.
gfs 是 抽样 在 460hz; 当 gfs 是 高, 这个 管脚 输出 一个 高 信号.
如果 gfs 是 低 第八 consecutive 样本, 这个 管脚 输出 低. 输入 当 lkin = 1.
spindle 发动机 伺服 控制 输出.
disc innermost 追踪 发现 信号 输入.
2/3 频率 分隔 输出 为 xtai 管脚.
数字的 电源 供应.
sled 驱动 输出.
sled 驱动 输出.
追踪 驱动 输出.
追踪 驱动 输出.
focus 驱动 输出.
DV
DD
0
XRST
沉默的
数据
XLAT
CLOK
敏感性
SCLK
ATSK
WFCK
XUGF
XPCK
GFS
C2PO
SCOR
C4M
WDCK
DV
SS
0
COUT
MIRR
DFCT
FOK
PWMI
锁
MDP
SSTP
FSTO
DV
DD
1
SFDR
SRDR
TFDR
TRDR
FFDR
标识 i/o 描述