2961
高-电流
half-桥
printhead/发动机 驱动器
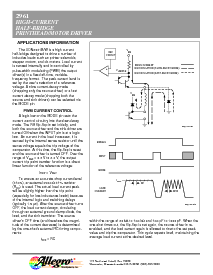
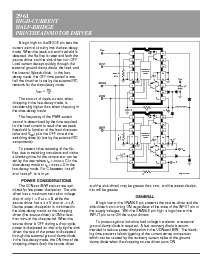
一个 逻辑 高 在 这 模式 管脚 sets 这
电流-控制 电路系统 在 这 快-decay
模式. 当 这 顶峰 电流 门槛 是
发现, 这 flip-flop 是 重置 和 两个都 这
源 驱动器 和 这 下沉 驱动器 转变 止.
加载 电流 decays quickly 通过 这
外部 地面 clamp 二极管, 这 加载, 和
这 内部的 flyback 二极管. 在 这 快-
decay 模式, 这 止 时间 时期 是 一个-
half 这 时间 那 是 设置 用 这 外部 rc
网络 为 这 慢-decay 模式:
t
止
=
这 数量 的 波纹 电流, 当
chopping 在 这 快-decay 模式, 是
非常 高等级的 比 当 chopping 在
这 慢-decay 模式.
这 频率 的 这 pwm 电流
控制 是 决定 用 这 时间 必需的
为 这 加载 电流 至 reach 这 设置 顶峰
门槛 (一个 函数 的 这 加载 character-
istics 和 v
BB
) 加 这 止 时间 的 这
切换 驱动器(s) (设置 用 这 外部 rc
组件).
至 阻止 false resetting 的 这 flip-
flop, 预定的 至 切换 过往旅客 和 噪音,
一个 blanking 时间 为 这 比较器 能 是
设置 用 这 用户 在哪里 t
B
≈
3600 x c 在 这
慢-decay 模式 或者 t
B
≈
2400 x c 在 这
快-decay 模式. 为 c 在 100 pf
和 1000 pf, t
B
是 在
µ
s.
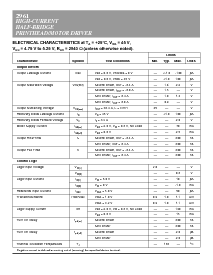
电源 仔细考虑
这 udn2961b/w 输出 是 opti-
mized 为 低 电源 消耗. 这 下沉
驱动器 有 一个 最大 饱和 电压
漏出 的 仅有的 1.4 v 在 3.4 一个, 当 这
源 驱动器 有 一个 2.2 v 漏出 在 -3.4 一个.
设备 电源 消耗 是 使减少到最低限度 在
这 慢-decay 模式, 作 这 chopping
驱动器 (这 源 驱动器) 是 在 为 较少
比 50% 的 这 chop 时期. 当 这
源 驱动器 是 止 在 一个 chop 循环,
电源 是 dissipated 在 碎片 仅有的 用 这 下沉
驱动器; 这 rest 的 这 电源 是 dissipated
通过 这 外部 地面 clamp 二极管.
在 这 快-decay 模式, 这 在 时间 的 这
chopping 驱动器 (两个都 这 源 驱动器
和 这 下沉 驱动器) 将 是 更好 比 50%, 和 这 电源 dissipa-
tion 将 是 更好.
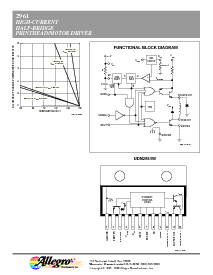
一般
一个 逻辑 低 在 这 使能 管脚 阻止 这 源 驱动器 和 这
下沉 驱动器 从 turning 在, regardless 的 这 状态 的 这 输入 管脚 或者
这 供应 电压. 和 这 使能 管脚 高, 一个 逻辑 低 在 这
输入 管脚 转变 在 这 输出 驱动器.
至 保护 相反 inductive 加载 电压 过往旅客, 一个 外部
地面 clamp 二极管 是 必需的. 一个 快-恢复 二极管 是 recom-
mended 至 减少 电源 消耗 在 这 udn2961b/w. 这 blank-
ing 时间 阻止 false triggering 的 这 电流 sense 比较器,
这个 能 是 造成 用 这 恢复 电流 尖刺 的 这 地面
clamp 二极管 当 这 chopping 源 驱动器 转变 在.
RC
2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
V
CC
V
BB
电流-
控制
逻辑
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
V
CC
电流-
控制
逻辑
2940
Ω
±
1%
V
REF
输入
使能
模式
V
BB
V
BB
V
BB
R
C
R
C
dwg. ep-038a
+5 v
+5 v
输入
47
µ
F
47
µ
F
2940
Ω
±
1%
BB
V
BB
V