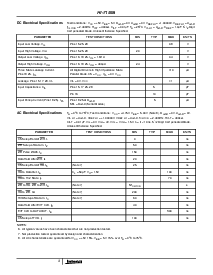
7
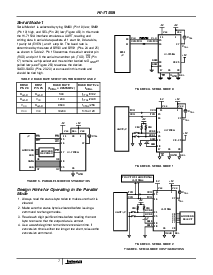
串行 模式 1
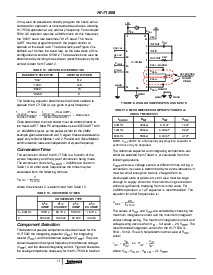
串行 模式 1 是 选择 用 tying SMS0 (管脚 18) 低, SMS1
(管脚 19) 高, 和 SEL (管脚 28) 低 (图示 4b). 在 这个 模式
这 hi-7159a 接口 emulates 一个 uart, 读 和
writing 数据 在 串行 数据 packets 的 1 开始 位, 8 数据 位,
1 parity 位 (甚至), 和 1 停止 位. 这 波特 比率 是
决定 用 这 状态 的 BRS0 和 BRS1 (管脚 24 和 25)
作 显示 在 表格 2. 管脚 15 变为 这 串行 接受者 管脚
(rxd) 和 管脚 16 这 串行 传输者 管脚 (txd).
cs (管脚
17) 仍然是 一个 碎片 选择 和 必须 也 是 系 至 D
地
或者
牵引的 低 (看 图示 2b) 至 进入 这 设备.
sad0-sad3 (管脚 20-23) 是 unused 在 这个 模式 和
应当 是 系 高.
设计 hints 为 运行 在 这 并行的
模式
1. 总是 读 这 状态 字节 两次 至 制造 确信 那 它 是
cleared.
2. 制造 确信 这 状态 字节 是 cleared 在之前 issuing 一个
command 至 改变 模式.
3. 读 各自 数字 一双 five 时间 在之前 读 这 next
字节 至 确保 那 这 输出 数据 是 准确无误的.
4. 使用 一个 看门狗 计时器 至 监控 转换 时间. 如果
转换 时间 是 也 too 长 或者 too 短的, reissue 这
转换 command.
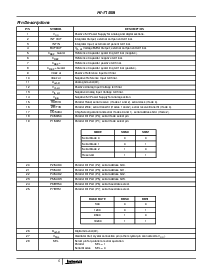
表格 2. 波特 比率 选择 为 模式 1 和 2
BRS0
管脚 24
BRS1
管脚 25
波特 比率
(f
XTAL
= 2.4576mhz)
波特 比率 vs
f
XTAL
D
地
D
地
300 f
XTAL
/8192
D
地
V
CC
1200 f
XTAL
/2048
V
CC
D
地
9600 f
XTAL
/256
V
CC
V
CC
19200 f
XTAL
/128
+5V
CS
15
RD
14 28
SEL
1
2716
17
地址
解码器
26
25
D7
18
D0
RD
D7
D0
µ
P
X
TAL
D
地
地址
总线
数据
总线
V
EE
V
CC
WR
WR
-5v
hi- 7159A
图示 3. 并行的 模式 配置
图示 4a. 串行 模式 0
图示 4b. 串行 模式 1
图示 4c. 串行 模式 2
图示 4. 串行 模式 配置
+5V
CS
15
14
1
27
16
26
18
17 28
CLK
rxd/txd
CLK
rxd/txd
SM0
SEL
8051
19
SM1
10
11
V
EE
V
CC
D
地
hi-7159a
-5v
20-25
+5V
µ
P
X
TAL
X
TAL
+5V
TXD
RXD
RXD
TXD
SM0
+5V
SM1
BRS0
BRS1
+5V
20K20K
X
TAL
X
TAL
V
CC
V
EE
CS SELD
地
-5v
+5V
uart/
µ
P
15
14 1
2716
19
18
24
25
2617 28
20 - 23
hi-7159a
+5V
15
14
1
27
16
26
19
18
28
TXD
RXD
RXD
TXD
24
25
BRS0
BRS1
+5V
SEL
uart/
µ
P
20K20K
SM1
+5V
SM0
地址
选择
20
21
22
23
17
V
CC
V
EE
D
地
hi-7159a
-5v
至 向上 至 31 额外的
hi-7159as
X
TAL
X
TAL
hi-7159a