页 9
直接 rdram
™
k4r271669a/k4r441869a
rev. 1.02 jan. 2000
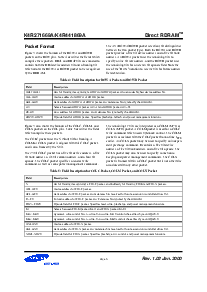
Table8 显示 这 cop 地方 encoding. 这 设备 必须 是
在 这 attn 电源 状态 在 顺序 至 receive colc packets.
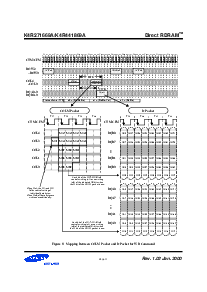
这 colc 小包装板盒 是 使用 primarily 至 具体说明 rd (读) 和
wr (写) commands. retire 行动 (移动的 数据 从
这 写 缓存区 至 一个 sense 放大) 发生 automatically. 看
Figure17 为 一个 更多 详细地 描述.
这 colc 小包装板盒 能 也 具体说明 一个 prec command,
这个 precharges 一个 bank 和 它的 有关联的 sense 放大器. 这
rda/wra commands 是 相等的 至 结合 rd/wr
和 一个 prec. rlxc (relax) 执行 一个 电源 模式 transi-
tion. 看
“
电源 状态 管理
“
在 页 38.
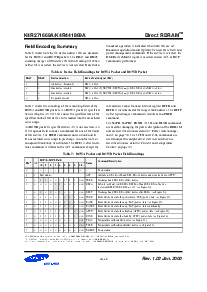
Table9 显示 这 colm 和 colx 地方 encodings. 这
m 位 是 asserted 至 具体说明 一个 colm 小包装板盒 和 二 8 位
bytemask 地方 毫安 和 mb. 如果 这 m 位 是 不 asserted, 一个
colx 是 指定. 它 有 设备 和 bank 地址 地方,
和 一个 opcode 地方. 这 primary 使用 的 这 colx 小包装板盒 是
至 准许 一个 独立 prex (precharge) command 至 是
指定 没有 consuming 控制 带宽 在 这 行
管脚. 它 是 也 使用 为 这 cal(calibrate) 和 sam
(样本) 电流 控制 commands (看
“
电流 和
温度 控制
“
在 页 43), 和 为 这 rlxx 电源
模式 command (看
“
电源 状态 管理
“
在 页
38).
表格 8:colc 小包装板盒 地方 encodings
S dc4.. dc0
(选择 设备)
一个
cop3..0 名字 command 描述
0 ---- ----- - 非 运作.
1 /= (devid4 ..0) ----- - retire 写 缓存区 的 这个 设备.
1 == (devid4 ..0) x000
b
NOCOP retire 写 缓存区 的 这个 设备.
1 == (devid4 ..0) x001 WR retire 写 缓存区 的 这个 设备, 然后 写 column c5..c0 的 bank bc4..bc0 至 写 缓存区.
1 == (devid4 ..0) x010 RSRV 保留, 非 运作.
1 == (devid4 ..0) x011 RD 读 column c5..c0 的 bank bc4..bc0 的 这个 设备.
1 == (devid4 ..0) x100 PREC retire 写 缓存区 的 这个 设备, 然后 precharge bank bc4..bc0 (看 figure14).
1 == (devid4 ..0) x101 WRA 一样 作 wr, 但是 precharge bank bc4..bc0 之后 写 缓存区 (和 新 数据) 是 retired.
1 == (devid4 ..0) x110 RSRV 保留, 非 运作.
1 == (devid4 ..0) x111 RDA 一样 作 rd, 但是 precharge bank bc4..bc0 afterward.
1 == (devid4 ..0) 1xxx RLXC move 这个 设备 在 这 备用物品 (stby) 电源 状态 (看 figure46).
一个.
“
/=
“
意思 不 equal,
“
==
“
意思 equal.
b. 一个
“
x
“
entry indicates 这个 commands 将 是 联合的. 为 instance, 这 二 commands wr/rlxc 将 是 指定 在 一个 cop 值(1001).
表格 9:colm 小包装板盒 和 colx 小包装板盒 地方 encodings
M
dx4 .. dx0
(选择 设备)
xop4..0 名字 command 描述
1 ---- - MSK mb/毫安 bytemasks 使用 用 wr/wra.
0 /= (devid4 ..0) - - 非 运作.
0 == (devid4 ..0) 00000 NOXOP 非 运作.
0 == (devid4 ..0) 1xxx0
一个
PREX precharge bank bx4..bx0 的 这个 设备 (看 figure14).
0 == (devid4 ..0) x10x0 CAL calibrate (驱动) i
OL
电流 为 这个 设备 (看 figure51).
0 == (devid4 ..0) x11x0 cal/sam calibrate (驱动) 和 样本 ( 更新) i
OL
电流 为 这个 设备 (看 figure51).
0 == (devid4 ..0) xxx10 RLXX move 这个 设备 在 这 备用物品 (stby) 电源 状态 (看 figure46).
0 == (devid4 ..0) xxxx1 RSRV 保留, 非 运作.
一个. 一个
“
x
“
entry indicates 这个 commands 将 是 联合的. 为 instance, 这 二 commands prex/rlxx 将 是 指定 在 一个 xop 值 (10010).