典型 产品
(持续)
B 速 仔细考虑
在 这 系统 的
图示 5
和 这 SH omitted 如果 n-位 accu-
racy 是 desired 这 改变 的 这 相似物 输入 电压
应当 是 较少 比
g
12 LSB 在 这 AD 转换
时间 T
C
在 其它 words 这 相似物 输入 回转 rate (比率 的
改变 的 输入 电压) 将 导致 一个 回转-induced 错误
和 它的 magnitude 和 遵守 至 这 总的 系统 error 将
取决于 在 这 particular application
D
V
在
D
t
最大值
k
g
12 LSB
T
C
e
V
FS
2
n
c
T
C
在哪里 V
FS
是 这 全部 规模 电压 的 这 AD 便条 那
回转 induced errors 是 不 影响 用 这 MUX 转变 时间
自从 我们 能 let 这 单位 settle 在之前 开始 conversion
Example Let T
C
e
40
m
s (mm4357) V
FS
e
10V 和 n
e
8
D
V
在
D
t
最大值
k
1mV
m
s
这个 是 一个 非常 小 number 一个 10 vp-p sine 波 的 一个
频率 更好 比 32 Hz 将 有 高等级的 回转 比率
比 this 这 最大 throughput 比率 的 这 在之上 8-
频道 系统 将 是 计算 使用 两个都 这 AD
转换 时间 和 这 总 的 MUX 转变 ‘‘ON’’ 时间
和 安排好 time ie
Th R
最大值
e
1
8(t
C
一个
T
MUX
)
e
3k samplessec
频道
T
MUX
e
T
在
一个
T
s(在)
也 注意 那 Nyquist 抽样 criteria 将 准许
各自 频道 至 有 一个 信号 带宽 的 15 kHz max
当 这 回转 限制 dictates 一个 最大 频率 的 32
Hz 如果 这 输入 信号 有 一个 顶峰-至-顶峰 电压 较少
比 10V 这 容许的 最大 输入 频率 能 是
计算 by
f
最大值
e
(回转 比率)最大值
q
vp-p
在 这 其它 hand 如果 这 输入 电压 是 不 带宽-限制 一个
低 通过 过滤 和 一个 attenuation 的 30 dB 或者 更好的 在 15
kHz 应当 是 连接 在 front 的 这 MUX
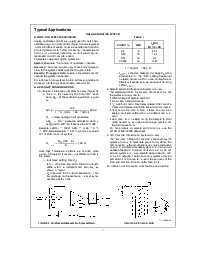
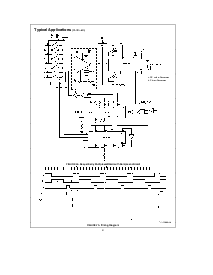
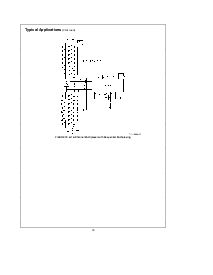
1 Improving 系统 速 和 一个 样本 和 支撑
这 系统 速 能 是 改进 用 使用 这
SH 显示 在
图示 5
这个 准许 一个 更 更好
比率 的 改变 的 V
在
D
V
在
D
t
最大值
k
V
FS
2
n
c
T
一个
在哪里 T
一个
是 这 aperture 时间 的 这 SH 这个 repre-
sents 一个 输入 回转 比率 改进 用 一个 factor T
C
T
一个
Here again 这 回转 比率 错误 是 不 影响 用
这 acquisition 时间 的 这 样本 和 支撑 自从 con-
版本 将 开始 之后 这 SH 有 settled
一个 impor-
tant thing 至 注意 是 那 这 样本 和 支撑 errors
将 增加 至 这 总的 系统 错误 budget therefore 这
inequality 的 这
D
V
在
D
t expression 应当 变为
更多 stringent
Example T
C
e
40
m
s T
一个
e
05
m
s n
e
8 T
C
T
一个
e
80
所以 这 使用 的 一个 SH 准许 一个 速 改进 用
nearly 二 顺序 的 magnitude
这 最大 throughput 比率 能 是 计算 by
Th R
最大值
e
1
8(t
一个
一个
Taq
一个
T
C
)
注意 那 T
MUX
做 不 影响 这
D
V
在
D
t expression
也不 这 throughput 比率
的 这 系统 自从 它 将 是
切换 和 settled 当 这 样本 和 支撑 是 在 这
支撑 mode 这个 是 true 提供 that T
MUX
k
T
一个
一个
T
C
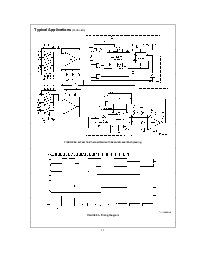
C 系统 例子
(图示 7)
这 LF398 SH 和 一个 1000 pF 支撑 capacitor 有 一个 交流-
quisition 时间 的 4
m
s 至 01% (14 LSB 错误 为 8 位) 和
一个 aperture 时间 的 较少 比 200
m
s 在 这 其它 hand
之后 这 支撑 command 这 输出 将 settle 至
g
005 mV
在 1
m
s This 一起 和 这 acquisition time introduces
大概 一个
g
14 LSB error 准许 另一 14 LSB
错误 为 支撑 步伐 和 增益 非-linearity 这 最大 回转
错误 (
D
V
在
D
t) 应当 不 超过 14 LSB or
D
V
在
D
t
s
1
4
c
1
256
c
1
T
一个
5mV
m
s
(这个 是 这 最大 回转 比率 ofa5V顶峰 sine wave
也 注意 that 预定的 至 这 在之上 输入 回转 restrictions
这 相似物 延迟 造成 用 这 finite BW 的 这 SH 和 这
数字的 延迟 造成 用 这 回馈 时间 的 这 控制
将 是 negligible 这 最大 throughput 比率 的 这 sys-
tem is
Th R
最大值
e
1
8(5
一个
40)10
b
6
e
2800 samplessecch
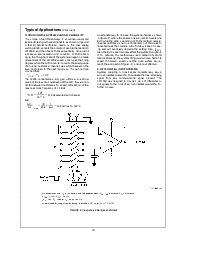
如果 这 系统 速 (所需的)东西 是 relaxed 但是 这 AD
转换器 是 安静的 too slow 然后 一个 inexpensive SH 能 是
建造 用 使用 just 一个 电容 和 一个 低 费用 场效应晶体管 输入 运算
放大 作 显示 在
图示 8
8