4.0 函数的 描述
(持续)
$b2: 读 软件 版本 号码
Reply 字节 #1: $C7 (软件 版本 号码)
字节 #2: 第一 字节 在 版本 号码, 年 20 (00-99)
字节 #3: 第二 字节 在 版本 号码, month (1-12)
字节 #4: 第三 字节 在 版本 号码, 日 (1-31)
$b3: 读 # 的 校准 点
Reply 字节 #1: $CA (acknowledge)
字节 #2: (
$
00 — 非 校准 完毕,
$
02 — 2 点,
$
05 — 5 点 或者
$
0D — 13 点)
$b4: 读 贮存 校准 点
Reply 字节 #1: $CA (acknowledge)
字节 #2: (
$
00 — 非 校准 完毕,
$
02 — 2 点,
$
05 — 5 点 或者
$
0D — 13 点)
字节 #3: x-最大值 (2 MSB 为 coordinate 1)
字节 #4: x-最小值 (8 LSB 为 coordinate 1)
字节 #5: y-最大值 (2 MSB 为 coordinate 1)
字节 #6: y-最小值 (8 LSB 为 coordinate 1)
Continue 直到 所有 coordinates 有 被 sent. 一个 零 是 send
后面的 如果 校准 有 不 被 执行 和 那里 是 非
数据 字节.
$b8: 设置 focus 值
字节 #2: Focus 值 (0-63)
Reply 字节 #1: $CA (acknowledge)
字节 #2: Focus 值 (0-63)
这 设置 focus command 准许 这 设置 的 不同的 值
至 改进 touch screen focusing. Focusing 是 定义 作 这
能力 的 这 touch screen 控制 至 发现 exactly identi-
cal coordinate 值 从 度量 至 度量 如果
这 pointer 在 这 touch screen 有 不 moved. 这 focus
值 是 相等的 至 pixels 的 touch screen 决议. 如果
为 例子 一个 值 的 2 是 选择, 这个 意思 那 每
coordinate 值 那 是 在里面 二 pixels 的 这 先前
量过的 coordinate 值 是 考虑 至 是 完全同样的 至
那 previous 值 和 那 在 这个 情况 这 touch screen
控制 transmits 这 previous coordinate 信息. 这个
keeps 这 mouse pointer 稳步的 在 这 要点 正在 touched,
相当 比 "jumping 周围" 这 要点. 一个 Focus 值 的 零
使不能运转 这 focusing algorithm. 这 default 设置 是 4.
$ba: 设置 号码 的 样本 每 coordinate
字节 #2: 号码 的 样本 每 coordinate ($01 - 1
样本/coordinate, $02 - 2 样本/coordinate, $04
- 4 样本/coordinate, $08 - 8 样本/coordinate,
$10 - 16 样本/coordinate, $20 - 32
样本/coordinate)
Reply 字节 #1: $CA (acknowledge)
字节 #2: 号码 的 样本 每 coordinate ($01 - 1
样本/coordinate, $02 - 2 样本/coordinate, $04
- 4 样本/coordinate, $08 - 8 样本/coordinate,
$10 - 16 样本/coordinate, $20 - 32
样本/coordinate)
这个 command 准许 这 选择 的 不同的 样本 num-
bers 每 x, y, 和 Z coordinates. 这 高等级的 这 号码 的
样本 每 x, y, 和 Z coordinates, 这 更好的 这 精度,
但是 这 更小的 这 coordinates 每 第二 数据 比率. 这
default 设置 是 8.
$bb: 设置 交流 模式
字节 #2: 交流 模式 (
$
01 = stream,
$
02 =
touchdown,
$
04 = liftoff)
Reply 字节 #1: $CA (acknowledge)
字节 #2: 交流 模式 (
$
01 = stream,
$
02 =
touchdown,
$
04 = liftoff)
看 这 交流 模式 部分 为 一个 描述 的
这 stream, touchdown 和 liftoff 模式. 这个 command
选择 这 交流 模式. 这 default 设置 是
stream 模式.
$bc: 设置 最大值 delta
字节 #2: 最大值 delta 值 (0-63)
Reply 字节 #1: $CA (acknowledge)
字节 #2: 最大值 delta 值 (0-63)
看 这 averaging algorithms 部分 为 一个 详细地 descrip-
tion 的 这个 设置. Simply 放, 这个 command sets 如何 更
这 "coordinate velocity" 能 改变 从 一个 coordinate 至
这 next. 这 default 设置 是 8.
$bd: 设置 校准 点
字节 #2: 高 nibble: 号码 的 校准 点
(
$
01 = 二,
$
02 = five,
$
04 = thirteen)
低 nibble: 起作用的 校准 交叉 (1-13 = 交叉 #)
Reply 字节 #1: $CA (acknowledge)
字节 #2: 高 nibble: 号码 的 校准 点
(
$
01=二,
$
02=five,
$
04=thirtheen)
低 nibble: 起作用的 校准 交叉 # (1-13)
谈及 至 这 校准 部分 为 详细信息.
$be: 设置 最小 压力
字节 #2: 最小 压力 值 (0-127)
Reply 字节 #1: $CA (acknowledge)
字节 #2: 最小 压力 值 (0-127)
这个 设置 控制 如何 高 这 压力 (z-axis) 必须 是
在 顺序 为 样本 至 是 accepted. 设置 这个 值 too
低 将 结果 在 having faulty coordinates accepted. 这个
值 是 内部 multiplied 用 二 在 这 控制 (预定的 至
这 7-位 限制 在 这 交流 format, 这个 能
不 send 8-位 值 大 比 127 在 一个 字节). 这
default 设置 是 40.
$a0: Toggle 使不能运转/使能 外部 过滤 path
Reply 字节 #1: $CA (acknowledge)
字节 #2: (0 = now 无能, 1 = now 使能)
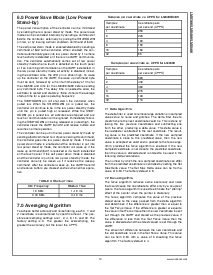
这个 command 使能/使不能运转 外部 过滤 path. 这 exter-
nal 过滤 path 使能 选项 将 需要 这 增加 的 一个
单独的 外部 低 通过 过滤 (也 r/c 或者 起作用的 OpAmp
为基础), 这个 是 然后 应用 至 这 touch screen 信号
线条. 这个 选项 能 是 使用 在 高 噪音 环境 至
significantly 改进 效能 和 精度 的 这 touch
screen 控制.
这 default 设置 是 过滤 path 使能.
$a2: Toggle 使不能运转/使能 自-电源 向下
Reply 字节 #1: $CA (acknowledge)
字节 #2: (0 = now 无能, 1 = now 使能)
这个 command 能 转变 在 自-电源 向下 模式
使能 或者 无能. 谈及 至 这 电源 保存 模式 部分
为 详细信息. 这 default 设置 是 自-电源 向下 模式
使能. 如果 这 echo 模式 是 使能, 任何 command 字节
send 至 这 设备 将 是 echo 后面的 和 executed.
$a3: Toggle 使不能运转/使能 echo 模式
Reply 字节 #1: $CA (acknowledge)
字节 #2: (0 = now 无能, 1 = now 使能)
这 echo 模式 是 有 为 debugging 目的. 如果 en-
abled, 这 touch screen 控制 将 echo 后面的 任何 数据
那 是 received 通过 这 UART 接口.
lm8300/lm8400/lm8500
www.国家的.com11