2/7
2005-08-01
直流 pir 控制
pir 控制
M7615
mosdesign 半导体 corp.
管脚 描述
管脚 名字 i/o 描述 管脚 非.
VDD
运作 电压 5V 保卫 用 电流 80~90uA
1
te i
te = 1m
4
vss 系统 地面. 5
CDS I 连接 至 一个 cds 为 inhibit , 当 vinhi = 0 使不能运转 ,vinhi = 1 使能 触发 6
RTXI
延迟 计时器 振荡器 输入
这 延迟 时间 的 接到 pir信号 至 触发 encoder 或者一个 高 信号 至 触发 接转.
这 范围 为 RTX=2K ~ 5 m
ctx=100p~0.01uf
为 100p 或者 0.01uf 延迟 时间=45000 r*c
为 1000p 延迟 时间=35000 r*c
延迟 时间 20 ms ~ 2250s
Ex CTX=100p RTX=680K 延迟 时间=3.1s
CTX=1000p RTX=100K 延迟 时间=3.5s
ctx=0.01uf RTX=10K 延迟 时间=4.5s
7
rti i
获得 计时器 振荡器 输入
这 获得 时间 的 这 范围 为 rti=100 k ~ 1 m
cti=0.1uf(fix)
包含 时间=35 r*c
包含 时间 > 0.5s ~
Ex cti=0.1uf RTI=1M 包含 时间=3.5s
8
uou2 o 2
nd
平台 运算 放大 输出. 9
ii2 i 2
nd
平台 运算 放大 负的 输入. 10
nii1 i 1
st
平台 运算 放大 积极的 输入. 11
ii1 i 1
st
平台 运算 放大 负的 输入. 12
接转 o
至 驱动 接转 起作用的 高.
13
uou1 i 1
st
平台 运算 放大 输出. 14
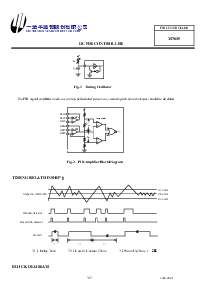
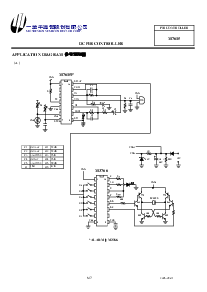
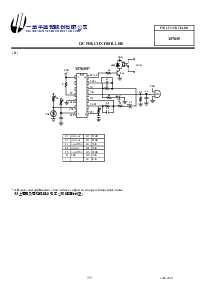
延迟 定时 和 获得 定时 振荡器 输入 管脚, 连接 至 外部 rc 至 获得 desired 延迟 持续时间.
能变的 延迟(获得) 持续时间 能 是 得到 用 selecting 各种各样的 值 的 rc 或者 使用 一个 能变的 电阻.