5
Motorola 传感器 设备 数据
MMA2260D
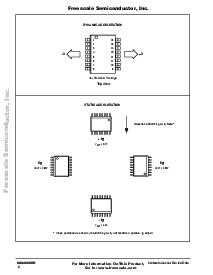
基本 连接
10
11
12
13
14
15
16
8
7
6
5
4
3
2
1
9
V
SS
*
V
SS
*
V
SS
*
V
输出
状态
V
DD
V
SS
ST
n/c
n/c
n/c
n/c
n/c
n/c
n/c
n/c
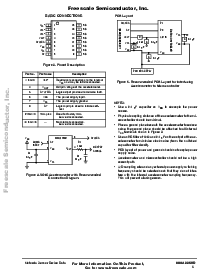
图示 3. 引脚 描述
管脚 非. 管脚 名字 描述
1thru3 V
SS
* Redundant 连接 至 这 内部的
V
SS
和 将 是 left unconnected.
4 V
输出
输出 电压 的 这 accelerometer.
5 状态 逻辑 输出 管脚 使用 至 表明 故障.
6 V
DD
这 电源 供应 输入.
7 V
SS
这 电源 供应 地面.
8 ST 逻辑 输入 管脚 使用 至 initiate 自--
测试.
9thru13 修整 管脚 使用 为 工厂 修整.
Leave unconnected.
14 thru 16 — 非 内部的 连接.
Leave unconnected.
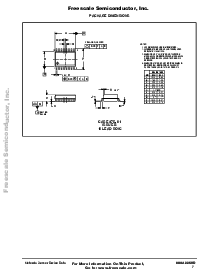
图示 4. SOIC Accelerometer 和 推荐
连接 图解
MMA2260D
ST
V
DD
V
SS
V
输出
输出
信号
R1
1k
Ω
4
C2
0.1
µ
F
8
6
7
逻辑
输入
V
DD
C1
0.1
µ
F
状态
5
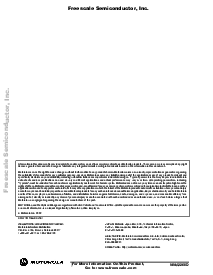
PCB 布局
P0
一个/d 在
V
RH
V
SS
V
DD
ST
V
输出
V
SS
V
DD
0.1
µ
F
C
1k
Ω
0.1
µ
F
C
0.1
µ
F
电源 供应
C
R
C
0.1
µ
F
微控制器
ACCELEROMETER
图示 5. 推荐 PCB 布局 为 接合
Accelerometer 至 微控制器
P1STATUS
注释:
•
usea0.1
µ
F 电容 在 V
DD
至 分离 这 电源
源.
•
物理的 连接 距离 的 这 accelerometer 至 这 mi-
crocontroller 应当 是 minimal.
•
放置 一个 地面 平面 beneath 这 accelerometer 至 减少
噪音, 这 地面 平面 应当 是 连结 至 所有 内部的
V
SS
terminals 显示 在 图示 3.
•
UseanRCfilterof1k
Ω
和 0.1
µ
F 在 这 输出 的 这 交流-
celerometer 至 降低 时钟 噪音 (从 这 切换
电容 过滤 电路).
•
PCB 布局 的 电源 和 地面 应当 不 couple 电源
供应 噪音.
•
Accelerometer 和 微控制器 应当 不 是 一个 高
电流 path.
•
一个/d 抽样 比率 和 任何 外部 电源 供应 切换
频率 应当 是 选择 此类 那 它们 做 不 inter-
fere 和 这 内部的 accelerometer 抽样 频率.
这个 将 阻止 aliasing errors.
F
r
e
e
s
c
一个
l
e
S
e
m
i
c
o
n
d
u
c
t
o
r
,
I
freescale 半导体, 公司
为 更多 信息 在 这个 产品,
go 至: www.freescale.com
n
c
.
.
.