MPX10 序列
5motorola 传感器 设备 数据
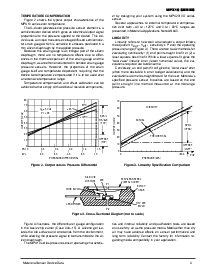
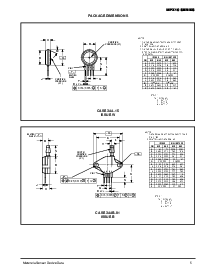
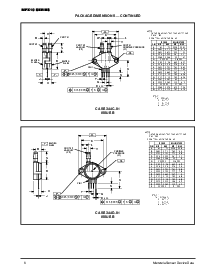
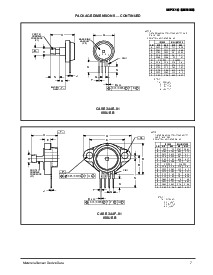
包装 维度
情况 344–15
公布 w
样式 1:
管脚 1. 地面
2. + 输出
3. + 供应
4. – 输出
M
一个
M
0.136 (0.005) T
1234
管脚 1
R
N
L
G
F
D
4 pl
SEATING
平面
–T–
C
M
J
B
–A–
DIM 最小值 最大值 最小值 最大值
MILLIMETERSINCHES
一个
0.595 0.630 15.11 16.00
B
0.514 0.534 13.06 13.56
C
0.200 0.220 5.08 5.59
D
0.016 0.020 0.41 0.51
F
0.048 0.064 1.22 1.63
G
0.100 bsc 2.54 bsc
J
0.014 0.016 0.36 0.40
L
0.695 0.725 17.65 18.42
M
30 nom 30 nom
N
0.475 0.495 12.07 12.57
R
0.430 0.450 10.92 11.43
__
注释:
1. dimensioning 和 tolerancing 每 asme
y14.5m, 1994.
2. controlling 维度: inch.
3. 维度 –a– 是 inclusive 的 这 模型
停止 环绕. 模型 停止 环绕 不 至 超过
16.00 (0.630).
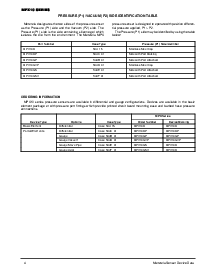
积极的
压力 (p1)
积极的
压力
(p1)
样式 1:
管脚 1. 地面
2. + 输出
3. + 供应
4. – 输出
情况 344b–01
公布 b
SEATING
平面
B
N
R
C
J
–T–
D
F
U
H
L
端口 #1
积极的
压力
管脚 1
–A–
–Q–
S
K
G
4 pl
–P–
S
Q
M
0.25 (0.010) T
S
S
M
0.13 (0.005) Q
S
T
12 34
注释:
1. dimensioning 和 tolerancing 每 ansi
y14.5, 1982.
2. controlling 维度: inch.
DIM 最小值 最大值 最小值 最大值
MILLIMETERSINCHES
一个
1.145 1.175 29.08 29.85
B
0.685 0.715 17.40 18.16
C
0.305 0.325 7.75 8.26
D
0.016 0.020 0.41 0.51
F
0.048 0.064 1.22 1.63
G
0.100 bsc 2.54 bsc
H
0.182 0.194 4.62 4.93
J
0.014 0.016 0.36 0.41
K
0.695 0.725 17.65 18.42
L
0.290 0.300 7.37 7.62
N
0.420 0.440 10.67 11.18
P
0.153 0.159 3.89 4.04
Q
0.153 0.159 3.89 4.04
R
0.230 0.250 5.84 6.35
S
U
0.910 bsc 23.11 bsc
0.220 0.240 5.59 6.10
(p1)