1995 十一月 27 5
飞利浦 半导体 产品 规格
数字的 伺服 驱动器 (dsd-2) OQ8844
函数的 描述
principle 的 一个 类-d 数字的 电源 驱动器
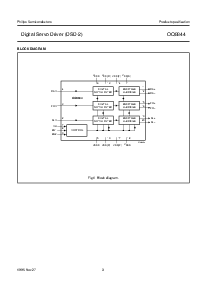
图示 3 显示 这 块 图解 的 一个 的 这 数字的
驱动器 整体的 在 这 dsd2. 它 组成 的 一个 定时 块
和 四 cmos switches. 这 输入 信号 是 一个 1-位 脉冲波
密度 modulated (pdm) 信号, 这 输出 的 这 数字的
伺服 ics.
这 最大 运行 时钟 频率 的 这 设备 是
5 mhz. 和 这 提到 数字的 伺服 ics, 这 运行
频率 的 这 数字的 驱动器 是 4.2336 MHz
(96
×
44.1 khz). 这 抽样 频率 的 这 1-位 代号
不管怎样 是 1.0584 mhz, 所以 内部 在 这 dsd2 这
时钟 速 的 这 switches 将 是 1.0584 mhz.
这 高等级的 输入 时钟 频率 是 使用 至 制造
非-overlapping 脉冲 至 阻止 短的-电路 在
这 供应 电压. 为 这 控制 的 这 switches, 二
states 能 是 distinguished. 如果 这 1-位 代号 包含 一个
逻辑 1, switches 一个 和 d 是 关闭 和 电流 将 流动
在 这 方向 作 显示 在 图.4.
如果 这 1-位 代号 包含 一个 逻辑 0, switches b 和 c 是
关闭 和 电流 将 流动 在 这 opposite 方向, 作
显示 在 图.5.
这个 indicates 那 这 区别 在 这 意思
号码 的 ones 和 zeros 在 这 pdm 信号 确定
这 方向 在 这个 这 actuator 或者 发动机 将 rotate.
如果 这 意思 号码 的 ones 和 zeros 是 equal (空闲 模式)
这 电流 通过 这 发动机 或者 actuator 是 alternated
在 这 积极的 和 负的 方向 在 一个 速 的
half 这 样本 频率 的 1.0584 mhz. 这个 结果 在 一个
高 消耗 和 这 发动机 做 不 move.
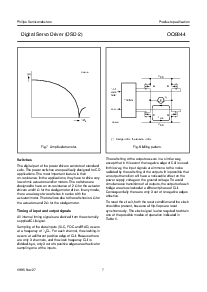
至 改进 这 效率, 一个 数字的 notch 过滤 是 增加 在
这 输入 的 这 数字的 驱动器. 这个 过滤 这 空闲 模式
模式 (1010101010 等.) 看 图.6.
这 振幅 转移 作 一个 函数 的 频率 是 给
在 图.7.
图示 7 显示 那 这 过滤 有 一个 零 在
1
⁄
2
f
s
,
consequentially 过滤 输出 这 空闲 模式 (101010).
这 输出 的 这个 过滤 是 一个 三-水平的 代号 (1.5-位).
为 这 控制 的 这 switches 三 states (1.5-位) 能 是
distinguished: 这 二 states 作 描述 早期 和 一个
第三 一个. 这个 状态 是 使用 当 一个 idling 模式 是
有提供的.
switches c 和 d 是 关闭 (看 图.8). 在 这个 空闲 模式,
非 电流 将 流动 和 因此 这 效率 将 是 改进.
这个 模式 是 也 使用 至 短的-电路 这 inductive
actuator/发动机. 在 这个 方法, 高 入门 电压 是
阻止 因为 这 电流 能 commutate 通过 这
过滤 和 这 短的-电路 在 这 switches. 所有 三 驱动器
(放射状的, focus 和 sledge) 包含 一个 数字的 notch 过滤 作
描述. 各自 驱动器 有 它的 自己的 电源 供应 管脚 至
减少 串扰 因为 的 这 相关的 高 电流
流 通过 这 管脚.