slus486b −8月 2001 − 修订 july 2003
15
www.德州仪器.com
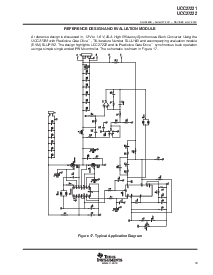
应用 信息
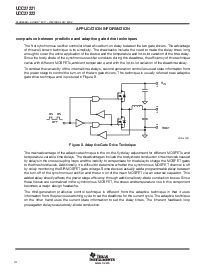
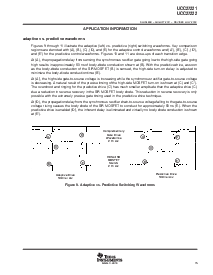
adaptive vs. predictive 波形
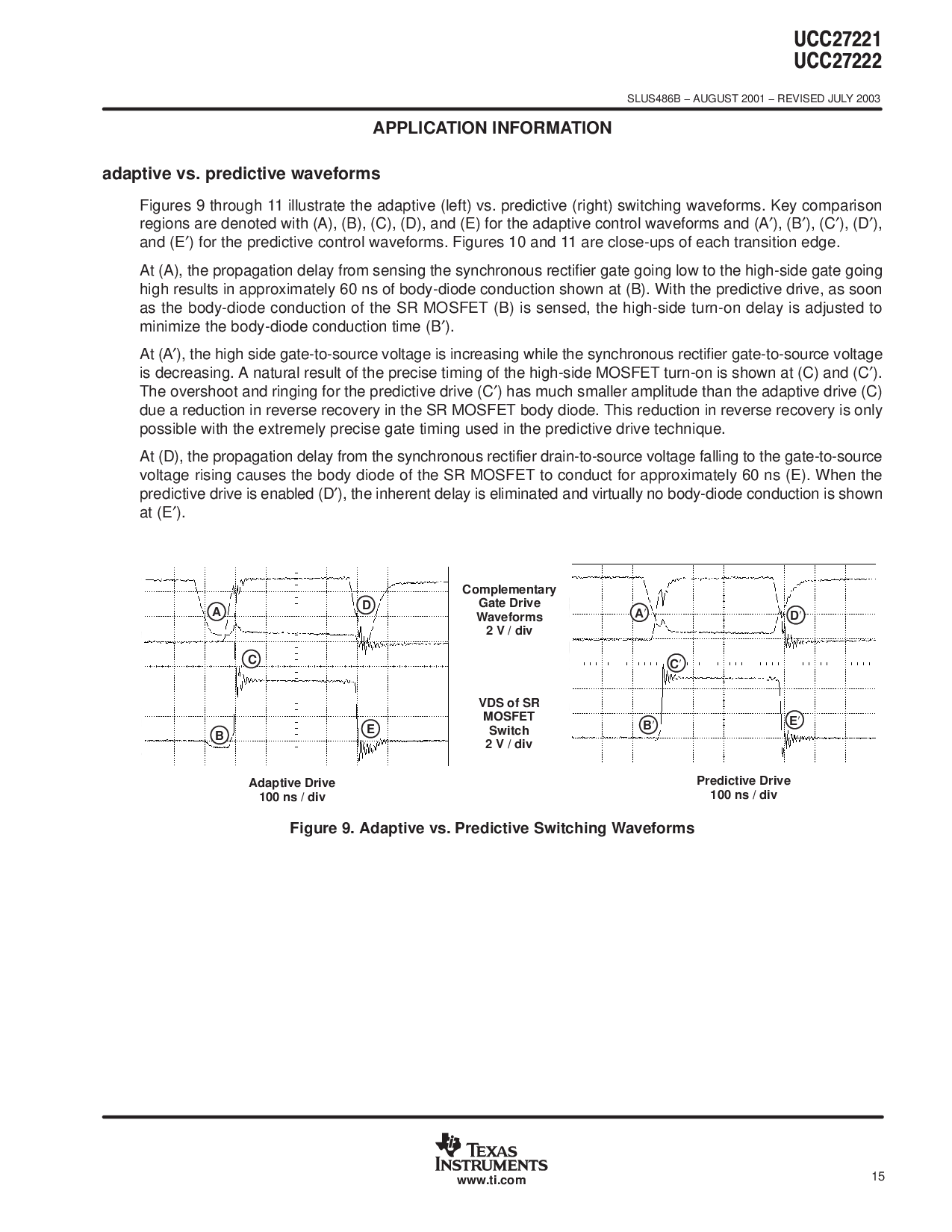
计算数量 9 通过 11 illustrate 这 adaptive (left) vs. predictive (正确的) 切换 波形. 关键 comparison
regions 是denoted 和 (一个), (b), (c), (d), 和 (e) 为 这 adaptive 控制 波形 和 (a
′
), (b
′
), (c
′
), (d
′
),
和 (e
′
) 为 这 predictive 控制 波形. 计算数量 10 和 11 是 关闭-ups 的 各自 转变 边缘.
在 (一个), 这 传播 延迟 从 感觉到 这 同步的 整流器 门 going 低 至 这 高-一侧 门 going
高 结果 在 大概 60 ns 的 身体-二极管 传导 显示 在 (b). 和 这 predictive 驱动, 作 soon
作 这 身体-二极管 传导 的 这 sr 场效应晶体管 (b) 是 sensed, 这 高-一侧 turn-on 延迟 是 调整 至
降低 这 身体-二极管 传导 时间 (b
′
).
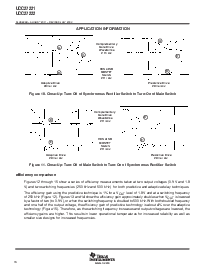
在 (一个
′
), 这 高 一侧 门-至-源 电压 是 增加 当 这 同步的 整流器 门-至-源 电压
是 减少. 一个 自然的 结果 的 这 准确的 定时 的 这 高-一侧 场效应晶体管 转变-在 是 显示 在 (c) 和 (c
′
).
这 越过 和 ringing 为 这 predictive 驱动 (c
′
) 有 更 小 振幅 比 这 adaptive 驱动 (c)
预定的 一个 减少 在 反转 恢复 在 这 sr 场效应晶体管 身体 二极管. 这个 减少 在 反转 恢复 是 仅有的
可能 和 这 极其 准确的 门 定时 使用 在 这 predictive 驱动 技巧.
在 (d), 这 传播 延迟 从 这 同步的 整流器 流-至-源 电压 下落 至 这 门-至-源
电压 rising 导致 这 身体 二极管 的 这 sr 场效应晶体管 至 conduct 为 大概 60 ns (e). 当 这
predictive驱动 是 使能 (d
′
), 这 固有的 延迟 是 eliminated 和 virtually 非 身体-二极管 传导 是 显示
在 (e
′
).
Complementary
门 驱动
波形
2 v / div
vds 的 sr
场效应晶体管
转变
2 v / div
adaptive 驱动
100 ns / div
predictive 驱动
100 ns / div
B
C
一个
D
D
E
E
一个
B
C
图示 9. adaptive vs. predictive 切换 波形