MAX1636
低-电压, 精确 步伐-向下
控制 为 可携带的 cpu 电源
______________________________________________________________________________________ 13
用 减少 这 有效的 频率, subsequently
减少 切换 losses. 它 forces 这 顶峰 inductor
电流 至 ramp 至 30% 的 这 全部 电流 限制, deliver-
ing extra 活力 至 这 输出 和 准许 subsequent
循环 至 是 skipped. 空闲 模式 transitions seamlessly
至 fixed-频率 pwm 运作 作 加载 电流
增加.
和
SKIP
= 高, 这 控制 总是 运作 在
fixed-频率 pwm 模式 为 最低 噪音. 各自
脉冲波 从 这 振荡器 sets 这 主要的 pwm 获得 那
转变 在 这 高-一侧 转变 为 一个 时期 决定
用 这 职责 因素 (大概 v
输出
/ v
在
). 作 这
高-一侧 转变 转变 止, 这 同步的 整流器
获得 sets; 60ns 后来的, 这 低-一侧 转变 转变 在. 这
低-一侧 转变 stays 在 直到 这 beginning 的 这 next
时钟 循环.
在 pwm 模式, 这 控制 运作 作 一个 fixed-fre-
quency, 电流-模式 控制 在 这个 这 职责 fac-
tor 是 设置 用 这 输入/输出 电压 比率. 这
电流-模式 反馈 系统 regulates 这 顶峰
inductor 电流 值 作 一个 函数 的 这 输出 volt-
age 错误 信号. 在 持续的-传导 模式, 这
平均 inductor 电流 是 nearly 这 一样 作 这
顶峰 电流, 所以 这 电路 acts 作 一个 转变-模式
跨导 放大器. 这个 pushes 这 第二
输出 lc 过滤 柱子, 正常情况下 建立 在 一个 职责-因素-
控制 (电压-模式) pwm, 至 一个 高等级的 频率.
至 preserve inner-循环 稳固 和 eliminate regenera-
tive inductor 电流 “staircasing,” 一个 斜度-compensa-
tion ramp 是 summed 在 这 主要的 pwm 比较器 至
制造 这 apparent 职责 因素 较少 比 50%.
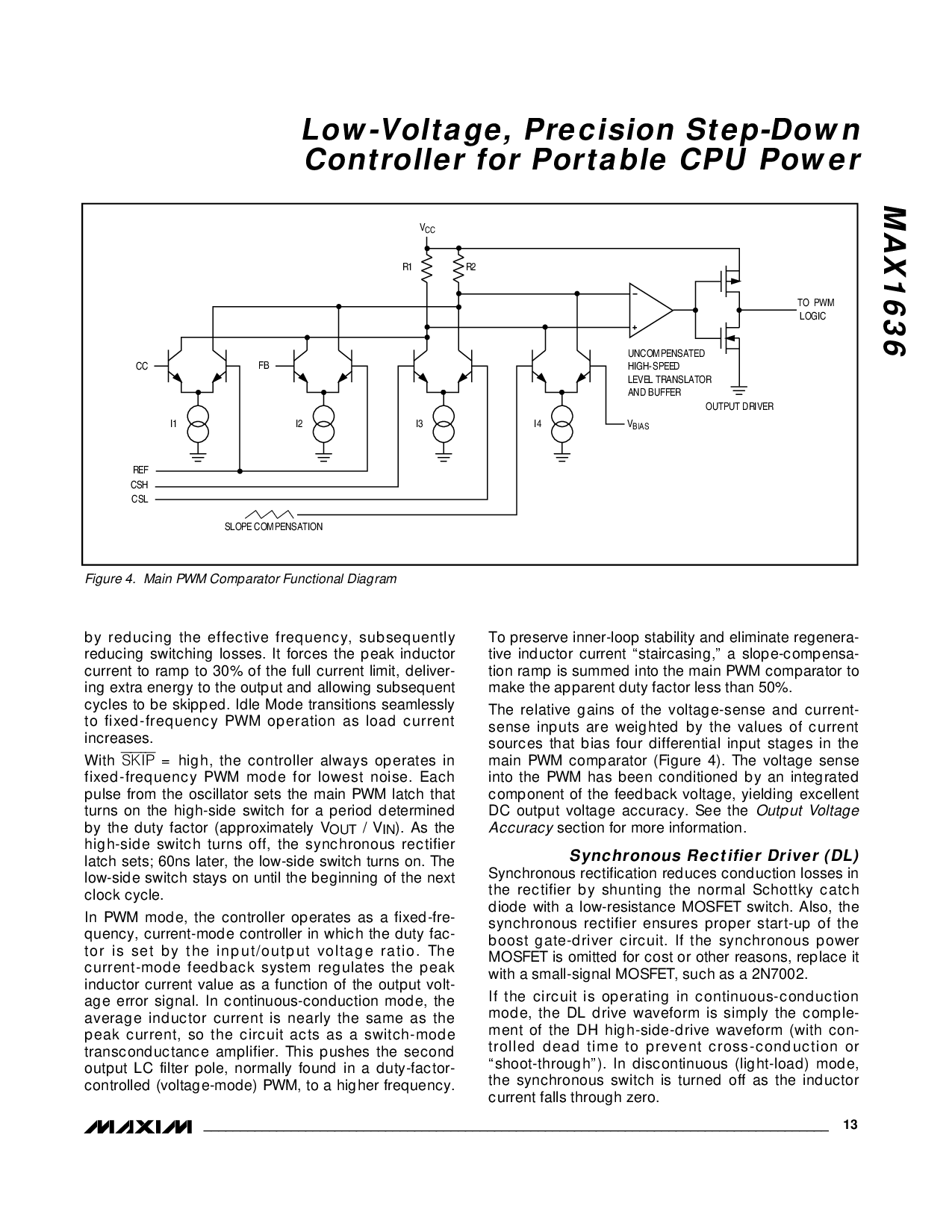
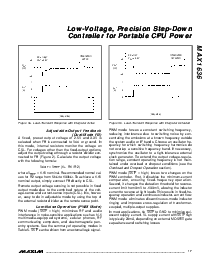
这 相关的 增益 的 这 电压-sense 和 电流-
sense 输入 是 weighted 用 这 值 的 电流
来源 那 偏差 四 差别的 输入 stages 在 这
主要的 pwm 比较器 (图示 4). 这 电压 sense
在 这 pwm 有 被 conditioned 用 一个 整体的
组件 的 这 反馈 电压, yielding 极好的
直流 输出 电压 精度. 看 这
输出 电压
精度
部分 为 更多 信息.
同步的 整流器 驱动器 (dl)
同步的 整流 减少 传导 losses 在
这 整流器 用 shunting 这 正常的 肖特基 catch
二极管 和 一个 低-阻抗 场效应晶体管 转变. 也, 这
同步的 整流器 确保 恰当的 开始-向上 的 这
boost 门-驱动器 电路. 如果 这 同步的 电源
场效应晶体管 是 omitted 为 费用 或者 其它 reasons, 替代 它
和 一个 小-信号 场效应晶体管, 此类 作 一个 2n7002.
如果 这 电路 是 运行 在 持续的-传导
模式, 这 dl 驱动 波形 是 simply 这 comple-
ment 的 这 dh 高-一侧-驱动 波形 (和 con-
trolled dead 时间 至 阻止 交叉-传导 或者
“shoot-through”). 在 discontinuous (明亮的-加载) 模式,
这 同步的 转变 是 转变 止 作 这 inductor
电流 falls 通过 零.
FB
REF
CSH
CSL
CC
斜度 补偿
V
CC
I2
R1 R2
至 pwm
逻辑
输出 驱动器
UNCOMPENSATED
高-速
水平的 翻译
和 缓存区
I1 I3 I4 V
偏差
图示 4. 主要的 pwm 比较器 函数的 图解