7
LTC1690
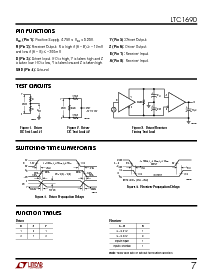
SWITCHIg 德州仪器e waveforS
UWW
–V
O
D
3V
0V
t
PLH
V
O
= v(一个) – v(b)
V
O
Z
Y
t
SKEW
t
SKEW
t
r
f = 1mhz, t
r
≤
10ns, t
f
≤
10ns
1.5v
90%
10%
50%
t
PHL
t
f
1.5v
90%
10%
50%
V
O
1/2 v
O
1690 f04
图示 4. 驱动器 传播 延迟
f = 1mhz, t
r
≤
10ns, t
f
≤
10ns
便条: t
SKD
= |t
PHL
– t
PLH
|
输入
输出
一个 – b
R
V
OD2
–V
OD2
5V
V
OL
t
PHL
0V
1.5v
t
PLH
0V
1.5v
1690 f05
图示 5. 接受者 传播 延迟
FUNCTIONTABLES
UU
驱动器
DZY
101
010
接受者
一个 – b R
≥
–0.01v 1
≤
–0.20v 0
输入 打开 1
输入 短接 1
便条:
表格 有效的 和 或者 没有 末端 电阻器.
1690 f01
Y
Z
R
R
V
OD2
V
OC
1690 f02
Y
Z
60
Ω
375
Ω
V
OD3
V
TST
–7v 至 12v
375
Ω
1690 f03
D
Y
Z
R
DIFF
一个
B
15pF
C
L1
C
L2
R
+
+
+
图示 1. 驱动器
直流 测试 加载 #1
图示 2. 驱动器
直流 测试 加载 #2
图示 3. 驱动器/接受者
定时 测试 加载
测试 电路
PINFUNCTIONS
UUU
V
CC
(管脚 1):
积极的 供应. 4.75v < v
CC
< 5.25v.
r (管脚 2):
接受者 输出. r 是 高 如果 (一个 – b)
≥
–10mV
和 低 如果 (一个 – b)
≤
–200mv.
d (管脚 3):
驱动器 输入. 如果 d 是 高, y 是 带去 高 和 z
是 带去 低. 如果 d 是 低, y 是 带去 低 和 z 是 带去 高.
地 (管脚 4):
地面.
y (管脚 5):
驱动器 输出.
z (管脚 6):
驱动器 输出.
b (管脚 7):
接受者 输入.
一个 (管脚 8)
: 接受者 输入.