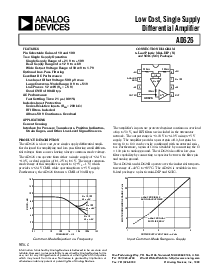
AD626
rev. c –3–
模型 AD626A AD626B
参数 情况 最小值 典型值 最大值 最小值 典型值 最大值 单位
增益
增益 精度 总的 错误
增益 = 10 R
L
= 10 k
Ω
0.2 0.5 0.1 0.3 %
增益 = 100 0.25 1.0 0.15 0.6 %
在 温度, t
一个
= t
最小值
–T
最大值
g = 10 50 30 ppm/
°
C
g = 100 100 80 ppm/
°
C
增益 线性
增益 = 10 0.045 0.055 0.045 0.055 %
增益 = 100 0.01 0.015 0.01 0.015 %
补偿 电压
输入 补偿 电压 50 500 50 250
µ
V
vs. 温度 T
最小值
–T
最大值
, g = 10 或者 100 1.0 0.5 mV
vs. 温度 T
最小值
–T
最大值
, g = 10 或者 100 1.0 0.5
µ
v/
°
C
vs. 供应 电压 (psr)
+PSR 74 80 74 80 dB
–PSR 64 66 64 66 dB
一般模式 拒绝 R
L
= 10 k
Ω
±
cmr 增益 = 10, 100 f = 100 hz, v
CM
= +24 v 66 90 80 90 dB
±
cmr 增益 = 10, 100 f = 10 khz, v
CM
= 6 v 55 60 55 60 dB
一般模式 电压 范围
+cmv 增益 = 10 cmr > 85 db 26.5 26.5 V
–cmv 增益 = 10 cmr > 85 db 32.5 32.5 V
输入
输入 阻抗
差别的 200 200 k
Ω
一般 模式 110 110 k
Ω
输入 电压 范围 (一般 模式) 6 (v
S
– 1) 6 (v
S
– 1) V
输出
输出 电压 摆动 R
L
= 10 k
Ω
积极的 增益 = 10, 100 4.7 4.90 4.7 4.90 V
负的 增益 = 10 1.65 2.1 1.65 2.1 V
增益 = 100 1.45 1.8 1.45 1.8 V
短的 电路 电流
+I
SC
12 12 毫安
–I
SC
0.5 0.5 毫安
噪音
电压 噪音 rti
增益 = 10 f = 0.1 hz–10 hz 2 2
µ
v p-p
增益 = 100 f = 0.1 hz–10 hz 2 2
µ
v p-p
增益 = 10 f = 1 khz 0.25 0.25
µ
v/
√
Hz
增益 = 100 f = 1 khz 0.25 0.25
µ
v/
√
Hz
动态 回馈
–3 db 带宽 V
输出
= +1 v 直流 100 100 kHz
回转 比率, t
最小值
至 t
最大值
增益 = 10 0.17 0.22 0.17 0.22 v/
µ
s
增益 = 100 0.1 0.17 0.1 0.17 v/
µ
s
安排好 时间 至 0.01%, 1 v 步伐 24 22
µ
s
电源 供应
运行 范围 T
一个
= t
最小值
–T
最大值
±
1.2
±
5
±
6
±
1.2
±
5
±
6V
安静的 电流 增益 = 10 1.5 2 1.5 2 毫安
增益 = 100 1.5 2 1.5 2 毫安
晶体管 计数 # 的 晶体管
46 46
规格 主题 至 改变 没有 注意.
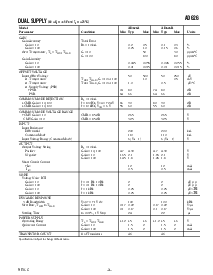
双 供应
(@ +v
S
=
5 v 和 t
一个
= +25
c)