BD7902CFS
视力的 disc ics
4/17
!
!!
!
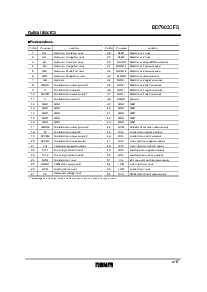
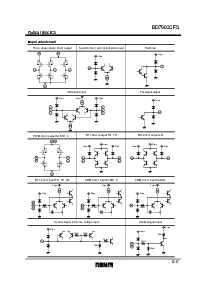
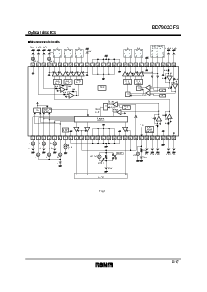
管脚 描述
管脚 非. 管脚 名字 函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
HU
+
HU
−
HV
+
HV
−
HW
+
HW
−
HB
PGND1
U
SPVM1
V
地
地
地
地
地
PGND2
W
SPVM2
SPRNF
FG
CTL1
CTL2
SPIN
DGND
LDIN
VC
通道 放大. u 积极的 输入
通道 放大. u 负的 输入
通道 放大. v 积极的 输入
通道 放大. v 负的 输入
通道 放大. w 积极的 输入
通道 放大. w 负的 输入
通道 偏差
spindle 驱动器 电源 地面 1
spindle 驱动器 输出 u
spindle 驱动器 电源 供应 1
spindle 驱动器 输出 v
地
地
地
地
地
spindle 驱动器 电源 地面 2
spindle 驱动器 输出 w
spindle 驱动器 电源 供应 2
spindle 驱动器 电流 sense
频率 发生器 输出
驱动器 逻辑 控制 输入 1
驱动器 逻辑 控制 输入 2
spindle 驱动器 输入
pwm 块 前-地面
加载 驱动器 输入
涉及 电压 输入
管脚 非. 管脚 名字 函数
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
SLIN1
SLIN2
SLVDD
SLRNF1
SLRNF2
SLGND
SLO2
−
SLO2
+
SLO1
−
SLO1
+
AGND
地
地
地
地
地
AVM
FCO
−
FCO
+
TKO
−
TKO
+
LDO
−
LDO
+
V
CC
TKIN
FCIN
DV
CC
sled 驱动器 1 输入
sled 驱动器 2 输入
sled 驱动器 powermos 前-供应
sled 驱动器 1 电流 sense
sled 驱动器 2 电流 sense
sled 驱动器 电源 地面
sled 驱动器 2 负的 输出
sled 驱动器 2 积极的 输出
sled 驱动器 1 负的 输出
sled 驱动器 1 积极的 输出
地面
地
地
地
地
地
actuator 驱动器 块 电源 供应
focus 驱动器 负的 输出
focus 驱动器 积极的 输出
追踪 驱动器 负的 输出
追踪 驱动器 积极的 输出
加载 驱动器 负的 输出
加载 驱动器 积极的 输出
btl 前 和 加载 电源 供应
追踪 驱动器 输入
focus 驱动器 输入
pwm 块 控制 电源 供应
∗
积极的/负的 的 这 输出 terminals 是 决定 在 涉及 至 那些 的 这 输入 terminals.