MAX3100
spi/microwire-兼容
uart 在 qsop-16
10 ______________________________________________________________________________________
表格 5. 位 描述 (持续)
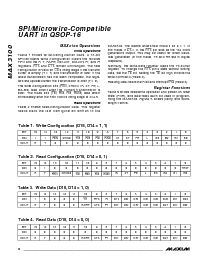
POR
状态
描述
读/
写
位
名字
0SHDNi w
软件-关闭 位. enter 软件 关闭 和 一个 写 配置 在哪里 shdni = 1.
软件 关闭 takes 效应 之后
CS
变得 高, 和 导致 这 振荡器 至 停止 作 soon
作 这 传输者 变为 空闲. 软件 关闭 也 clears r, t, ra/fe, d0r–d7r,
d0t–d7t, pr, pt, 和 所有 数据 在 这 receive 先进先出. rts 和 cts 能 是 读 和 updated
当 在 关闭. exit 软件 关闭 和 一个 写 配置 在哪里 shdni = 0. 这
振荡器 restarts 典型地 在里面 50ms 的
CS
going 高. rts 和 cts 是 unaffected. 谈及
至 这
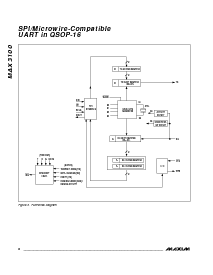
管脚 描述
为 硬件 关闭 (
SHDN
输入).
0SHDNo r
关闭 读-后面的 位. 这 读-配置 寄存器 输出 shdno = 1 当 这 uart
是 在 关闭. 便条 那 这个 位 是 不 sent 直到 这 电流 字节 在 这 传输者 是 sent (t =
1). 这个 tells 这 处理器 当 它 将 shut 向下 这 rs-232 驱动器. 这个 位 是 也 设置 imme-
diately 当 这 设备 是 shut 向下 通过 这
SHDN
管脚.
0ra/fe r
接受者-activity/framing-错误 位. 在 关闭 模式, 这个 是 这 ra 位. 在 正常的 operation,
这个 是 这 fe 位. 在 关闭 模式, 一个 转变 在 rx sets ra = 1. 在 正常的 模式, 一个 fram-
ing 错误 sets fe = 1. 一个 framing 错误 occurs 如果 一个 零 是 received 当 这 第一 停止 位 是
预期的. fe 是 设置 当 一个 framing 错误 occurs, 和 cleared 在之上 receipt 的 这 next 恰当的-
ly framed character 独立 的 这 先进先出 正在 使能. 当 这 设备 wakes 向上, 它 是
likely 那 一个 framing 错误 将 出现. 这个 错误 能 是 cleared 和 一个 写 配置. 这
fe 位 是 不 cleared 在 一个 读 数据 运作. 当 一个 fe 是 encountered, 这 uart resets
它自己 至 这 状态 在哪里 它 是 looking 为 一个 开始 位.
0ST w
transmit-停止 位. 一个 停止 位 将 是 transmitted 当 st = 0. 二 停止 位 将 是 transmit-
ted 当 st = 1. 这 接受者 仅有的 需要 一个 停止 位.
0ST r 读 这 值 的 这 st 位.
0
TM
w
掩饰 为 t 位.
IRQ
是 asserted 如果
TM
= 1 和 t = 1 (表格 6).
0
TM
r
读 这 值 的 这
TM
位 (表格 6).
1T r
transmit-缓存区-empty 标记. t = 1 意思 那 这 transmit 缓存区 是 empty 和 准备好 至
接受 另一 数据 文字.
0
TE
w
transmit-使能 位. 如果
TE
= 1, 然后 仅有的 这
RTS
管脚 将 是 updated 在
CS
’s rising 边缘. 这
内容 的
RTS
, pt, 和 d0t–d7t transmit 在
CS
’s rising 边缘 当
TE
= 0.
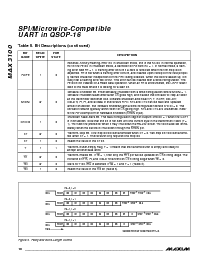
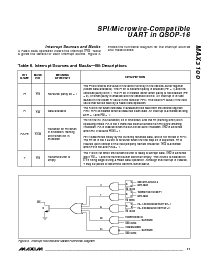
空闲
第二 停止 位 是 omitted 如果 st = 0.
pe = 1, l = 1
时间
D0START D1 D2 D3 D4 D5 D6 Pt
STOPSTOP
空闲
空闲
pe = 1, l = 0
D0START D1 D2 D3 D4 D5 D6 D7 Pt 停止 停止 空闲
空闲
pe = 0, l = 1
D0START D1 D2 D3 D4 D5 D6 停止 停止 空闲
空闲
pe = 0, l = 0
D0START D1 D2 D3 D4 D5 D6 D7 停止 停止 空闲
图示 5. parity 和 文字-长度 控制