max4298/max4299
过激-高 psrr 立体的 驱动器 +
microphone 放大 + 100ma 直线的 调整器
6 _______________________________________________________________________________________
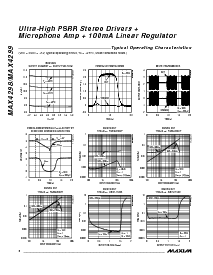
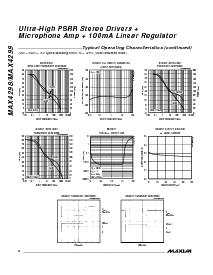
驱动器 输出
打开-循环 频率 回馈
输入 频率 (khz)
0.01 10 100 10000.1 1 10,000
增益 (db)
90
-10
0
10
20
30
40
50
80
70
60
0
阶段 (deg)
200
20
40
60
80
100
120
180
160
140
增益
阶段
10k
Ω
|| 22nf
max4298/99 toc19
0.01 10.1 10 100
micout 所有 不利的 crosstlak
(输入 涉及)
max4298/99 toc20
输入 频率 (khz)
所有 不利的 串扰 (db)
-20
-120
-100
-60
-40
-80
一个
V
= -100
micout 打开 循环
频率 回馈
max4298/99 toc21
输入 频率 (khz)
增益 (db)
90
-10
10
30
50
70
0.01 10 100 10000.1 1
80
60
40
20
0
阶段
增益
10k
Ω
|| 15pf
10,000
0
阶段 (deg)
200
20
40
60
80
100
120
180
160
140
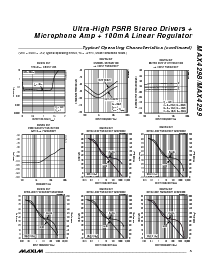
micout 打开 循环
频率 回馈
max4298/99 toc22
输入 频率 (khz)
增益 (db)
90
-10
10
30
50
70
0.01 10 100 10000.1 1 10,000
80
60
40
20
0
10k
Ω
|| 150pf
200
180
160
140
120
100
80
60
40
20
0
阶段
增益
0 0.5 1.0 1.5
MICOUT
thd+n vs. 振幅
max4298/99 toc23
振幅 (v
RMS
)
thd+n (%)
10
0.0001
0.001
0.01
0.1
1
2.0
R
L
= 10k
Ω
一个
V
= -1
f
在
= 1khz
bw = 22khz
3.0
3.1
3.3
3.2
3.4
3.5
04020 60 80 100
regout 输出 电压
vs. 加载 电流
max4298/99 toc24
加载 电流 (毫安)
输出 电压 (v)
200µs/div
regout 瞬时 回馈
100mA
V
输出
30mv/div
0
max4298/99 toc25
I
L
200µs/div
regout 瞬时 回馈
max4298/99 toc26
100mA
V
输出
30mv/div
10mA
I
L
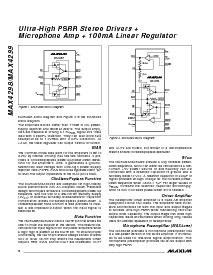
典型 运行 特性 (持续)
(v
CC
= sv
CC
= +5v, 典型 运行 电路, t
一个
= +25
°
c, 除非 否则 指出.)