MC145583
MOTOROLA
4
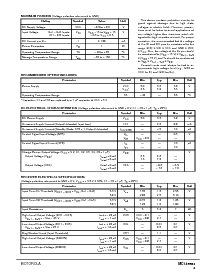
驱动器 电的 规格
(电压 polarities 关联 至 地 = 0 v; v
CC
= + 3.3 v 或者 + 5.0 v
±
10%; c1 – c5 = 1
µ
f; t
一个
= 25
°
c)
参数
标识 最小值 典型值 最大值 单位
数字的 输入 电压 di1 – di3
逻辑 低
逻辑 高
V
IL
V
IH
—
1.8
—
—
0.7
—
V
数字的 输入 电流 di1 – di3
V
DI
= 地
V
DI
= v
CC
I
IL
I
IH
—
—
7
—
—
±
1.0
µ
一个
输出 高 电压
加载 在 所有 tx1 – tx3, r
L
= 3 k
Ω
; c
P
= 2500 pf, v
DI1
–
DI3
= 逻辑 低
非 加载
V
OH
5.0
8.5
7.0
8.8
—
—
V
输出 低 电压
加载 在 所有 tx1 – tx3, r
L
= 3 k
Ω
; c
P
= 2500 pf, v
DI1
–
DI3
= 逻辑 高
非 加载
V
OL
—
—
– 7.0
– 8.8
– 5.0
– 8.5
V
波纹 (谈及 至 v
DD
– v
SS
值) *** V
RF
— —
±
5%
止 源 阻抗 tx1 – tx3 Z
止
300 — —
Ω
输出 短的 电路 电流 (v
CC
= 3.3 v 或者 5.5 v)
tx1 – tx3 短接 至 gnd*
tx1 – tx3 短接 至
±
15 v**
I
SC
—
—
—
—
±
60
±
100
毫安
* 规格是 为 一个 tx 输出 至 是 短接 在 一个 时间. 应当 所有 三 驱动器 输出 是 短接 同时发生地, 设备 电源 消耗
限制 可以 是 超过.
** 这个 情况 可以 超过 包装 限制.
*** 波纹 v
RF
将 不 超过
±
5% 的 (v
DD
– v
SS
).
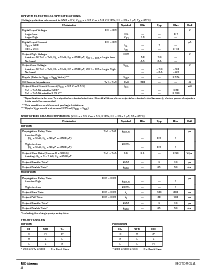
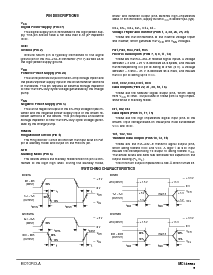
切换 特性
(v
CC
= + 3.3 v 或者 + 5 v,
±
10%; c1 – c5 = 1
µ
f; t
一个
= 25
°
c)
参数
标识 最小值 典型值 最大值 单位
驱动器
传播 延迟 时间 tx1 – tx3
Low–to–High
(r
L
= 3 k
Ω
, c
L
= 50 pf 或者 2500 pf)
t
DPLH
— 0.5 1
µ
s
High–to–Low
(r
L
= 3 k
Ω
, c
L
= 50 pf 或者 2500 pf)
t
DPHL
— 0.5 1
输出 回转 比率 (源 r = 300
Ω
) tx1 – tx3
加载: r
L
= 3 – 7 k
Ω
; c
L
= 2500 pf
SR
±
4 —
±
30 v/
µ
s
输出 使不能运转 time* t
DAZ
— 4 10
µ
s
输出 使能 time* t
DZA
— 25 50 ms
接受者
传播 延迟 时间 do1 – do5
Low–to–High
t
RPLH
— — 1
µ
s
High–to–Low t
RPHL
— — 1
输出 上升 时间 do1 – do5 t
r
— 120 200 ns
输出 下降 时间 do1 – do5 t
f
— 40 100 ns
输出 使不能运转 time* t
RAZ
— 4 10
µ
s
输出 使能 time* t
RZA
— 25 50 ms
* 包含 这 承担 打气 建制 时间.
真实 tables
驱动器
DI STB Tx
X H Z*
H L L
L L H
* V
SS
≤
V
Tx
≤
V
DD
x = don’t 小心
接受者
Rx STB 做
X H Z*
H L L
L L H
* 地
≤
V
做
≤
V
CC
x = don’t 小心