MCP2551
ds21667d-页 4
2003 微芯 技术 公司
表格 1-1: 模式 的 运作
表格 1-2: transceiver 真实 表格
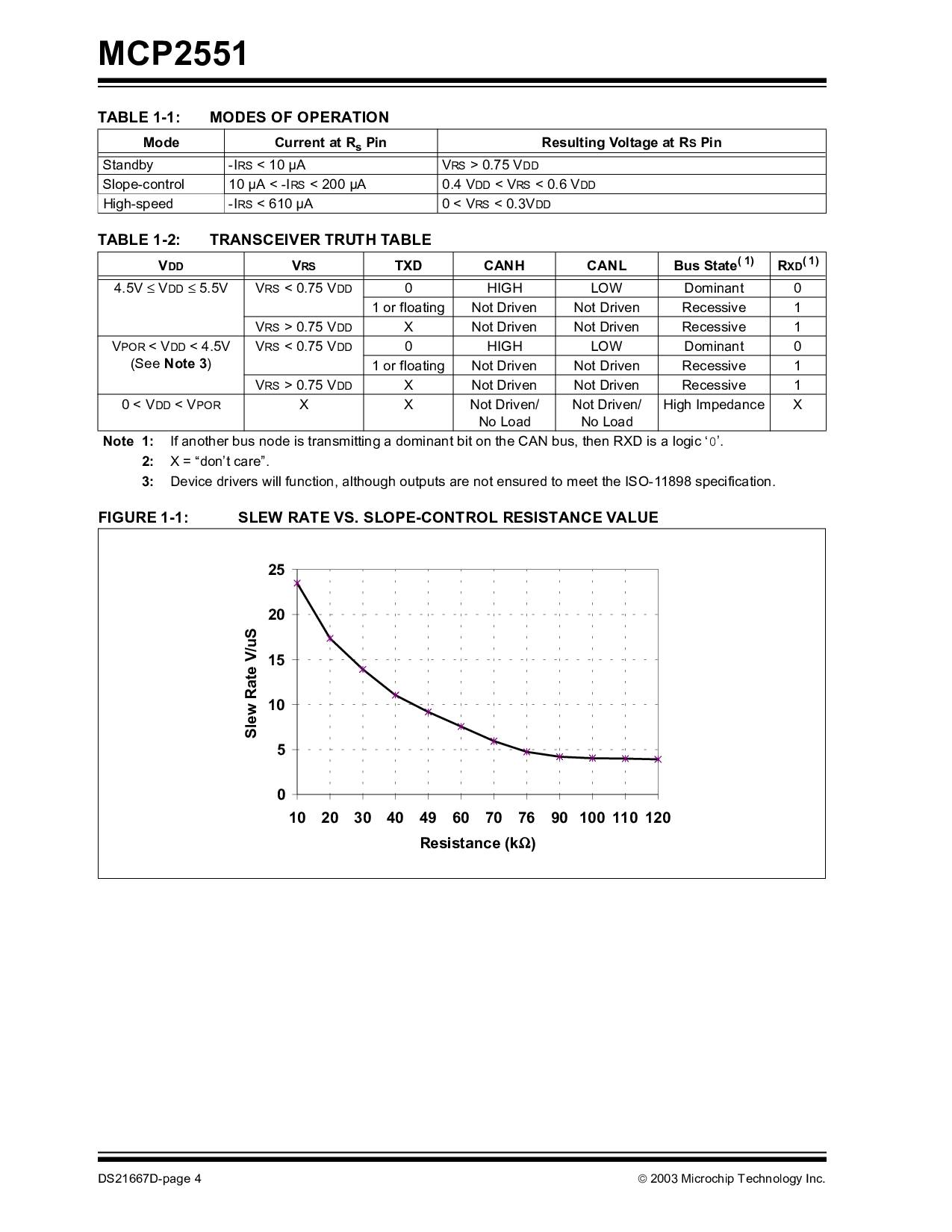
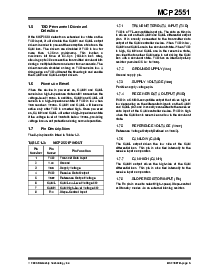
图示 1-1: 回转 比率 vs. 斜度-控制 阻抗 值
模式 电流 在 r
s
管脚 结果 电压 在 r
S
管脚
备用物品 -i
RS
< 10 µA V
RS
> 0.75 V
DD
斜度-控制 10 µa < -i
RS
< 200 µA 0.4 V
DD
< v
RS
< 0.6 V
DD
高-速 -i
RS
< 610 µA 0 < v
RS
< 0.3v
DD
V
DD
V
RS
TXD CANH CANL 总线 状态
(1)
R
XD
(1)
4.5v
≤
V
DD
≤
5.5v V
RS
< 0.75 V
DD
0 高 低 首要的 0
1 或者 floating 不 驱动 不 驱动 Recessive 1
V
RS
> 0.75 V
DD
X 不 驱动 不 驱动 Recessive 1
V
POR
< v
DD
< 4.5v
(看
便条 3
)
V
RS
< 0.75 V
DD
0 高 低 首要的 0
1 或者 floating 不 驱动 不 驱动 Recessive 1
V
RS
> 0.75 V
DD
X 不 驱动 不 驱动 Recessive 1
0 < v
DD
< v
POR
xxnot 驱动/
非 加载
不 驱动/
非 加载
高 阻抗 X
便条 1:
如果 另一 总线 node 是 transmitting 一个 首要的 位 在 这 能 总线, 然后 rxd 是 一个 逻辑 ‘
0
’.
2:
x = “don’t care”.
3:
设备 驱动器 将 函数, 虽然 输出 是 不 保证 至 满足 这 iso-11898 规格.
0
5
10
15
20
25
10 20 30 40 49 60 70 76 90 100 110 120
阻抗 (k
Ω
)
回转 比率 v/美国