am186™ch hdlc 微控制器 数据 薄板 7
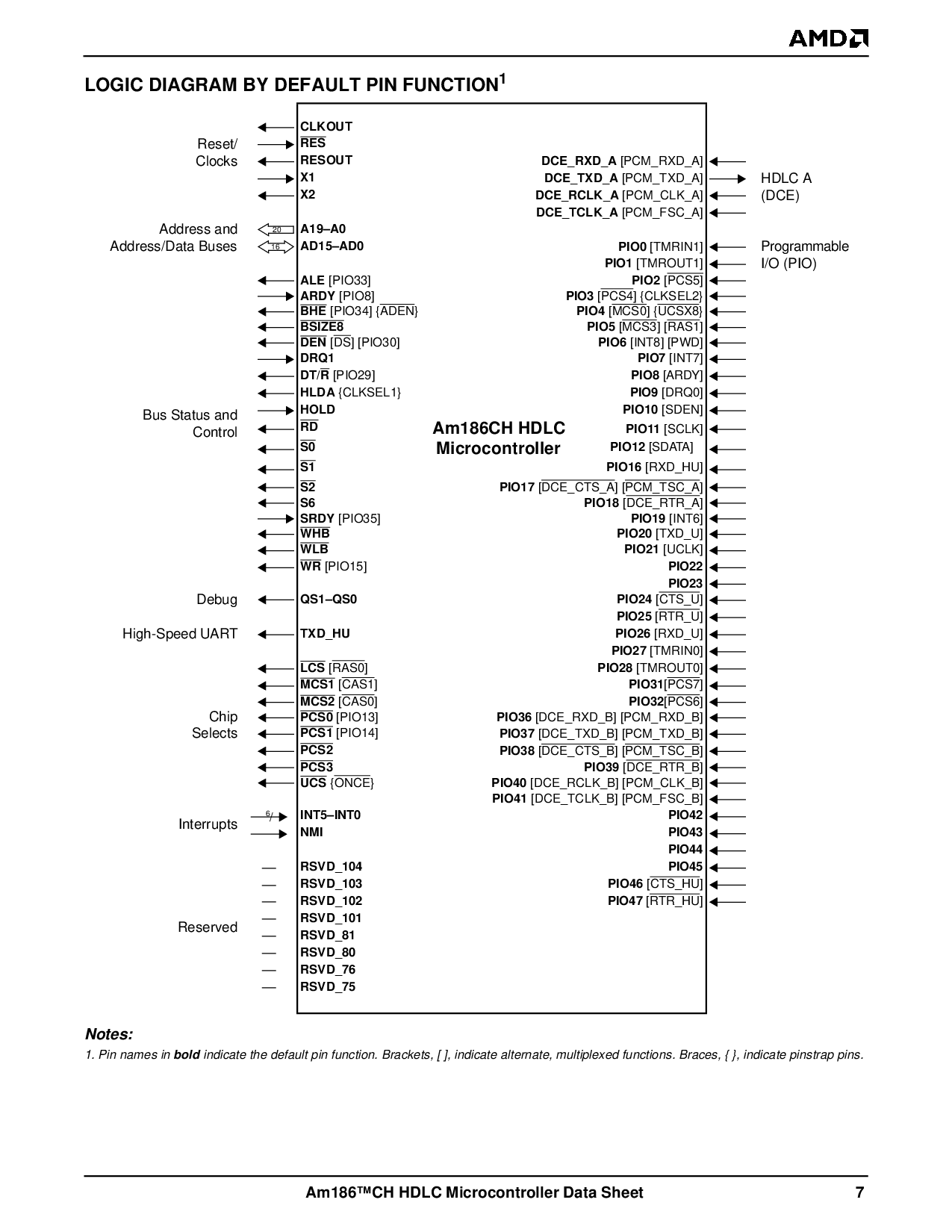
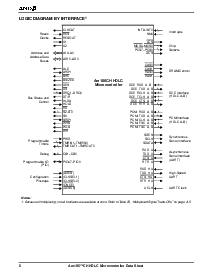
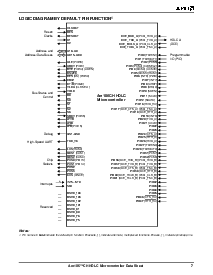
逻辑 图解 用 default 管脚 函数
1
注释:
1. 管脚 names 在
bold
表明 这 default 管脚 函数. brackets, [ ], 表明 alternate, 多路复用 functions. braces, { }, 表明 pinstrap pins.
CLKOUT
重置/
RES
Clocks
RESOUT
dce_rxd_一个
[pcm_rxd_a]
hdlc 一个
(dce)
X1
dce_txd_一个
[pcm_txd_a]
X2
dce_rclk_一个
[pcm_clk_a]
dce_tclk_一个
[pcm_fsc_a]
地址 和
地址/数据 buses
A19–A0
AD15–AD0
PIO0
[TMRIN1]
可编程序的
i/o (pio)
PIO1
[TMROUT1]
总线 状态 和
控制
ALE
[PIO33]
PIO2
[PCS5]
ARDY
[PIO8]
PIO3
[PCS4] {clksel2}
BHE
[pio34] {aden}
PIO4
[MCS0] {ucsx8}
BSIZE8
PIO5
[MCS3] [ras1]
DEN
[DS] [pio30]
PIO6
[int8] [pwd]
DRQ1 PIO7
[INT7]
dt/r
[PIO29]
PIO8
[ARDY]
HLDA
{CLKSEL1}
PIO9
[DRQ0]
支撑 PIO10
[SDEN]
RD
am186ch hdlc
PIO11
[SCLK]
S0
微控制器
PIO12
[SDATA]
S1
PIO16
[rxd_hu]
S2
PIO17
[dce_cts_一个] [pcm_tsc_一个]
S6
PIO18
[dce_rtr_一个
]
SRDY
[PIO35]
PIO19
[INT6]
WHB
PIO20
[txd_u]
WLB
PIO21
[UCLK]
WR
[PIO15]
PIO22
PIO23
Debug
QS1–QS0 PIO24
[cts_u]
PIO25
[rtr_u
]
高-速 uart
txd_hu PIO26
[rxd_u]
PIO27
[TMRIN0]
碎片
选择
LCS
[RAS0]
PIO28
[TMROUT0]
MCS1
[CAS1]
PIO31
[PCS7]
MCS2
[CAS0]
PIO32
[PCS6]
PCS0
[PIO13]
PIO36
[dce_rxd_b] [pcm_rxd_b]
PCS1
[PIO14]
PIO37
[dce_txd_b] [pcm_txd_b]
PCS2
PIO38
[dce_cts_b] [pcm_tsc_b]
PCS3
PIO39
[dce_rtr_b]
UCS
{ONCE}
PIO40
[dce_rclk_b] [pcm_clk_b]
PIO41
[dce_tclk_b] [pcm_fsc_b]
中断
INT5–INT0 PIO42
NMI PIO43
PIO44
保留
—
rsvd_104
PIO45
—
rsvd_103
PIO46
[cts_hu]
—
rsvd_102
PIO47
[rtr_hu]
—
rsvd_101
—
rsvd_81
—
rsvd_80
—
rsvd_76
—
rsvd_75
20
16
6
/