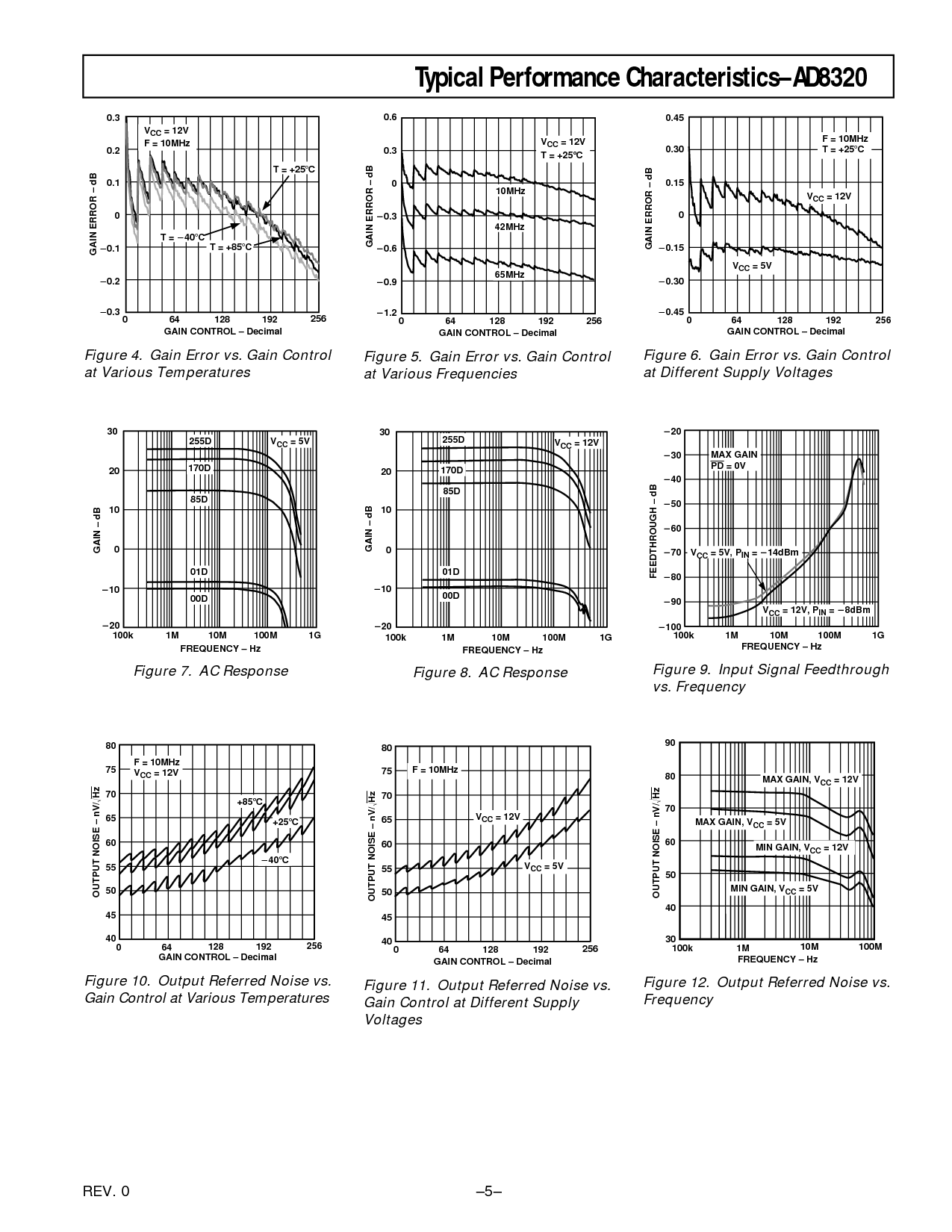
典型 效能 characteristics–ad8320
–5–
rev. 0
增益 控制 – decimal
增益 错误 – db
0
0.3
0.1
0.2
0
0.1
0.2
0.3
V
CC
= 12v
f = 10mhz
t = +85
C
t = +25
C
t =
40
C
64 128 192
256
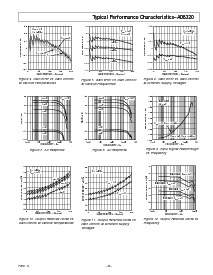
图示 4. 增益 错误 vs. 增益 控制
在 各种各样的 温度
频率 – hz
30
20
100k 1G1M 10M 100M
10
0
10
V
CC
= 5v
增益 – db
20
01D
00D
85D
170D
255D
图示 7. 交流 回馈
输出 噪音 – nv/
Hz
增益 控制 – decimal
80
064
128 192
256
75
70
65
60
55
50
45
40
+85
C
40
C
+25
C
f = 10mhz
V
CC
= 12v
图示 10. 输出 涉及 噪音 vs.
增益 控制 在 各种各样的 温度
增益 控制 – decimal
增益 错误 – db
0.45
0
0
0.30
0.15
0.45
64 128 192 256
0.15
f = 10mhz
t = +25
C
V
CC
= 5v
V
CC
= 12v
0.30
图示 6. 增益 错误 vs. 增益 控制
在 不同的 供应 电压
频率 – hz
20
100k 1G1M 10M 100M
90
V
CC
= 12v, p
在
=
8dBm
feedthrough – db
V
CC
= 5v, p
在
=
14dBm
最大值 增益
PD
= 0v
30
40
50
60
70
80
100
图示 9. 输入 信号 feedthrough
vs. 频率
输出 噪音 – nv/
Hz
频率 – hz
30
100k
1M
10M 100M
40
最大值 增益, v
CC
= 5v
50
最大值 增益, v
CC
= 12v
最小值 增益, v
CC
= 12v
最小值 增益, v
CC
= 5v
60
70
80
90
图示 12. 输出 涉及 噪音 vs.
频率
增益 控制 – decimal
增益 错误 – db
0.6
0.3
0
0.9
0.6
1.2
64 128 192 256
10MHz
42MHz
65MHz
0
0.3
V
CC
= 12v
t = +25
C
图示 5. 增益 错误 vs. 增益 控制
在 各种各样的 发生率
频率 – hz
30
20
100k 1G1M 10M 100M
10
0
10
V
CC
= 12v
增益 – db
20
01D
00D
85D
170D
255D
图示 8. 交流 回馈
输出 噪音 – nv/
Hz
增益 控制 – decimal
80
064
128 192
256
f = 10mhz
75
70
65
60
55
50
45
40
V
CC
= 5v
V
CC
= 12v
图示 11. 输出 涉及 噪音 vs.
增益 控制 在 不同的 供应
电压