LTC487
4
地 (管脚 8):
地 连接.
di3 (管脚 9):
驱动器 3 输入. 谈及 至 di1.
do3a (管脚 10):
驱动器 3 输出.
do3b (管脚 11):
驱动器 3 输出.
en34 (管脚 12):
驱动器 3 和 4 输出 使能. 看
函数 表格 为 详细信息.
do4b (管脚 13):
驱动器 4 输出.
do4a (管脚 14):
驱动器 4 输出.
di4 (管脚 15):
驱动器 4 输入. 谈及 至 di1.
V
CC
(管脚 16):
积极的 供应; 4.75 < v
CC
< 5.25.
di1 (管脚 1):
驱动器 1 输入. 如果 驱动器 1 是 使能, 然后 一个 低
在 di1 forces 这 驱动器 输出 do1a 低 和 do1b 高.
一个 高 在 di1 和 这 驱动器 输出 使能 将 强迫
do1a 高 和 do1b 低.
do1a (管脚 2):
驱动器 1 输出.
do1b (管脚 3):
驱动器 1 输出.
en12 (管脚 4):
驱动器 1 和 2 输出 使能. 看 func-
tion 表格 为 详细信息.
do2b (管脚 5):
驱动器 2 输出.
do2a (管脚 6):
驱动器 2 输出.
di2 (管脚 7):
驱动器 2 输入. 谈及 至 di1.
PI
U
FU
U
C
U
S
O
德州仪器
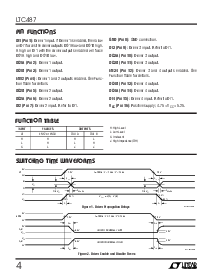
输入 使能 输出
DI en12 或者 en34 输出 一个 输出 b
HH HL
LH LH
XL ZZ
FU
U
C
U
O
德州仪器
表格
图示 2. 驱动器 使能 和 使不能运转 时间
h: 高 水平的
l: 低 水平的
x: irrelevant
z: 高 阻抗 (止)
德州仪器
W
E
WAVEFORS
U
G
WITCHI
W
S
图示 1. 驱动器 传播 延迟
ltc487 • ta06
一个, b
EN12
3V
0V
f = 1mhz : t 10ns : t 10ns
V
OL
V
OH
1.5v 1.5v
5V
输出 正常情况下 低
t
ZL
2.3v
t
LZ
0.5v
≤≤
一个, b
0V
t
ZH
2.3v
输出 正常情况下 高
t
HZ
0.5v
rf
–V
O
ltc487 • ta05
B
一个
DI
V
O
1/2 v
O
3V
0V
t
SKEW
1.5v
t
PLH
1.5v
t
PHL
1/2 v
O
v = v(一个) – v(b)
V
O
80%
20%
t
f
90%
DIFF
10%
t
SKEW
t
r
f = 1mhz : t 10ns : t 10ns
<<
rf