初步的 技术的 数据 ADIS16201
rev. prb| 页 13 的 31
忍耐力 限制 的 20,000 写 应当 是 带去 在
账户 当 considering 这 implementation 的 这 设备
在 这 终止 目标. 这 “non-volatile” column called 输出
在里面 表格 7 是 helpful 在 discerning 这个 控制 寄存器
写 必须 是 counted 相反 这 忍耐力 限制, along 和
这 预期的 更新 比率. 当 writing 至 一个 非-易变的
寄存器, 这 用户 needs 至 使确信 那 这 电源 供应 仍然是
在里面 限制 为 一个 最小 的 200 msec 之后 这 写 是
initiated. 这个 将 使确信 一个 successful 写 的 这 非-易变的
数据.
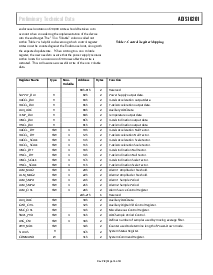
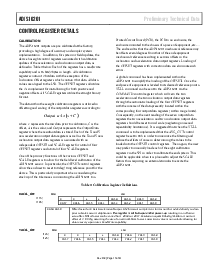
表格 7. 控制 regsiter mapping
寄存器 名字 类型 非-
易变的
地址 字节 函数
00h-01h 2 保留
供应_输出 r
02h 2
电源 供应 输出 数据.
xaccl_输出 r
04h 2
x-axis acceleration 输出 数据.
yaccl_输出 r
06h
2
y-axis acceleration 输出 数据.
aux_模数转换器 r
08h 2
auxiliary 模数转换器 数据
温度_输出 r
0ah 2
温度 输出 数据
xincl_输出 r
0ch 2
x-axis inclination 输出 数据.
yincl_输出 r
0eh 2
y-axis inclination 输出 数据.
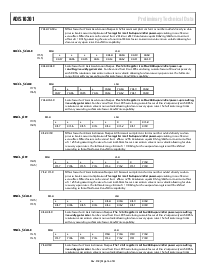
xaccl_ 止 r/w X 10h 2
x-axis acceleration 无效的 因素.
yaccl_ 止 r/w X 12h 2
y-axis acceleration 无效的 因素.
xaccl_ 规模 r/w X 14h 2
x-axis acceleration 规模 因素.
yaccl_ 规模 r/w X 16h 2
y-axis acceleration 规模 因素.
xincl_止 r/w x 18h 2
x-axis inclination 无效的 因素.
yincl_ 止 r/w X 1Ah 2
y-axis inclination 无效的 因素.
xincl_规模 r/w x 1ch 2
x-axis inclination 规模 因素.
yincl_ 规模 r/w X 1Eh 2
y-axis inclination 规模 因素.
alm_mag1 r/w x 20h 2
alarm 1 振幅 门槛.
alm_mag2 r/w X 22h 2
alarm 2 振幅 门槛.
alm_smpl1 r/w x 24h 2
alarm 1 样本 时期.
alm_smpl2 r/w x 26h 2
alarm 2 样本 时期.
alm_ctrl r/w X 28h 2 alarm 源 控制 寄存器
2ah-2fh 6 保留
aux_dac r/w 30h 2
auxiliary dac 数据.
gpio_ctrl r/w 32h 2
auxiliary 数字的 i/o 控制 寄存器.
msc_ctrl r/w 34h 2
miscellaneous 控制 寄存器.
smpl_prd r/w x 36h 2
模数转换器 样本 时期 控制.
avg_cnt r/w x 38h 2
定义 号码 的 样本 使用 用 移动的 平均 过滤.
pwr_mde r/w 3ah 2
计数器 使用 至 决定长度 的 电源-向下 模式.
状态
R
3ch 2
系统 状态 寄存器.
COMMAND W 3Eh 2 系统 command 寄存器.