Overview
版本 2.1, 二月 26, 2003
专卖的 至 omnivision 科技
5
O
mni ision
1Overview
omnivision 科技, 公司 有定义 和 deployed 这 串行 camera 控制 总线 (sccb),
一个 3-线 串行 总线, 为 控制 的 大多数 的这 功能 在 omnivision’s 家族 的 c
AMERA
C
HIPS
TM
.
在 减少 管脚 包装 部分, 这 sccb 运作 在 一个 修改 2-线 串行 模式.
omnivision c
AMERA
C
HIPS
将 仅有的 运作 作 从动装置 设备和 这 companion 后面的-终止 接口
必须 assert 作 这 主控. 一个 sccb 主控 device 能 是 连接 至 这 sccb 至 控制 在
least 一个 sccb 从动装置 设备. 一个 optional suspend-控制 信号 提供 这 能力 为 这
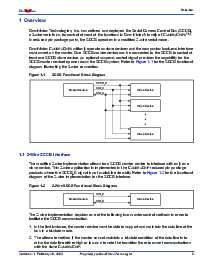
sccb 主控 设备 至 电源 向下 这 sccb 系统. 谈及 至图示 1-1为 这 sccb 函数的
图解 illustrating 这 3-线 连接.
图示 1-1 sccb 函数的 块 图解
1.1 2-线 sccb 接口
这 修改 2-线 implementation 准许 为 一个 sccb 主控 设备 至 接口 和 仅有的 一个
从动装置 设备. 这个 2-线 application 是 执行 在 这 c
AMERA
C
HIP
减少 管脚 包装
产品 在哪里 这 sccb_e 信号 是不 有 externally. 谈及 至图示 1-2为 这 函数的
图解 的 这 2-线 implementation 为 这 sccb 接口.
图示 1-2 2-线 sccb 函数的 块 图解
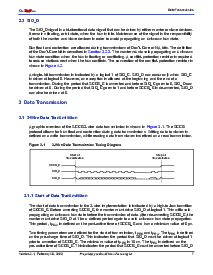
这 2-线 implementation 需要 一个 的 这 following 二 主控 控制 方法 在 顺序 至
facilitate 这 sccb 交流.
1. 在 这 第一 instance, 这 主控 设备 必须 是 能 至 支持 和 维持 这 数据 线条 的 这
总线 在 一个 触发-状态 模式.
2. 这 alternate 方法 如果 这 主控 不能 维持 一个 触发-状态 情况 的 这 数据 线条 是 至
驱动 这 数据 线条 也 高 或者 低 和 至 便条 这 转变 那里 至 assert communications
和 这 从动装置 c
AMERA
C
HIP
.
主控 设备 从动装置 设备
sio_c
sccb_e
sio_d
从动装置 设备
从动装置 设备
sio_d
sio_c
主控 设备 从动装置 设备