AD603
rev. g | 页 8 的 20
00539-016
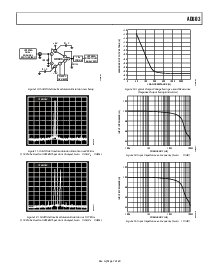
频率 (hz)
100M100k 1M 10M
输入 阻抗 (
Ω
)
100
102
98
96
94
图示 16. 输入 阻抗 vs. 频率 (增益 = +30 db)
00539-017
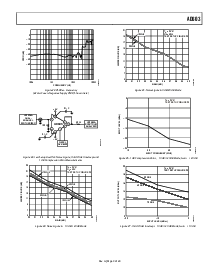
1V
200ns
1V
10
0%
100
90
图示 17. 增益 控制 频道 回馈 时间
00539-018
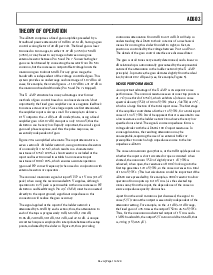
451ns–49ns 50ns
4.5v
500mV
–500mV
输入 地
1v/div
输出 地
500mv/div
图示 18. 输入 平台 超载 恢复 时间
(输入 是 500 ns 时期, 50% 职责 cycle 正方形的 波, 输出 是 captured
使用 tektronix 11402 digitizing oscilloscope)
00539-019
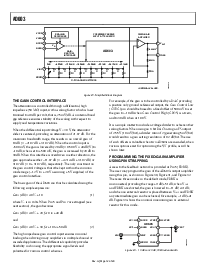
451ns–49ns 50ns
3V
1V
–2V
输入 地
100mv/div
输出 地
1v/div
图示 19. 输出 平台 超载 恢复 时间
(输入 是 500 ns 时期, 50% 职责 循环 正方形的 波, 输出 是 captured
使用 tektronix 11402 digitizing oscilloscope)
00539-020
地
地
456ns–44ns 50ns
3.5v
500mV
–1.5v
输入
500mv/div
输出
500mv/div
图示 20. 瞬时 回馈, g = 0 db
(输入 是 500 ns 时期, 50% 职责 cycle 正方形的 波, 输出 是 captured
使用 tektronix 11402 digitizing oscilloscope)
00539-021
456ns–44ns 50ns
3.5v
500mV
–1.5v
输入 地
100mv/div
输出 地
500mv/div
图示 21. 瞬时 回馈, g = +20 db
(输入 是 500 ns 时期, 50% 职责 cycle 正方形的 波, 输出 是 captured
使用 tektronix 11402 digitizing oscilloscope)