十一月 1992 7
飞利浦 半导体 初步的 规格
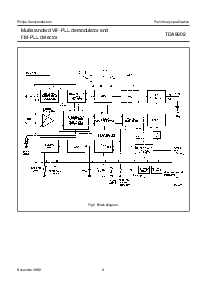
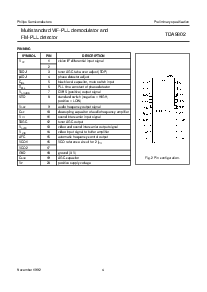
multistandard vif-pll demodulator 和
fm-pll 探测器
TDA9802
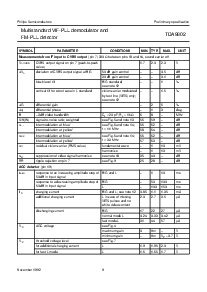
特性
V
P
=5v; t
amb
= +25
°
c; f
PC
= 38.9 mhz; f
SC
= 33.4 mhz 和 v
PC
/v
SC
= 13 db (b/g); v
iIF
= 10 mV rms 值
(同步 水平的 在 b/g; 顶峰-白 水平的 在 l); video 调制 dsb; residual carrier: b/g = 10%, l = 3%; video 信号 在
一致 和 ccir 线条 17; 度量 带去 在 图.3 除非 否则 specified
标识 参数 情况 最小值 典型值 最大值 单位
V
P
供应 电压 范围 (管脚 20) 看 便条 1 4.5 5 8.8 V
I
P
供应 电流 51 60 69 毫安
标准 转变 输入
(管脚 8)
V
IH
输入 电压 为 负的 调制 看 便条 2 1.5
−
V
P
V
V
IL
输入 电压 为 积极的 调制 0
−
0.8 V
I
IL
低 水平的 输入 电流 V
8
=0V
−−
300
−
360
µ
一个
vision 如果 输入
(管脚 1 和 2)
b/g 标准
V
i
输入 信号 敏锐的 (rms 值)
−
1 db video 在 输出
−
50 90
µ
V
最大 输入 信号 (rms 值) +1 db video 在 输出 70 150
−
mV
∆
V
i
如果 振幅 区别 在 picture 和
声音 运输车
在里面 agc 范围
−
0.7 1 dB
G
如果
如果 增益 控制 范围 看 图.4 64 70 73 dB
B
−
3 db 如果 带宽 upper 截-止 频率 70 100
−
MHz
R
i
输入 阻抗 1.7 2.2 2.7 k
Ω
C
i
输入 电容 1.2 1.7 2.5 pF
V
1, 2
直流 输入 电压 3.0 3.4 3.8 V
真实 同步的 video demodulator
看 便条 3
f
VCO
最大 振荡器 频率 为 运输车
regeneration
f=2f
PC
125 130
−
MHz
∆
f
VCO
振荡器 逐渐变化 (自由 运动) 作 一个 函数 的
温度
看 便条 4;
∆
T = 0 to+70
°
C
−−±
1300 10
−
6
V
o ref
振荡器 摆动 在 管脚 16 和 17
(rms 值)
tbn 120 tbn mV
∆
f
PC
vision 运输车 俘获 范围 (
负的
) 1.5 2
−
MHz
vision 运输车 俘获 范围 (积极的) 1.5 2
−
MHz
t
acqu
acquisition 时间 看 便条 5; bl = 60 kHz
−−
30 ms
V
iIF
如果 输入 信号 敏锐的 (rms 值, 管脚 1
和 2)
为 pll 安静的 锁 看 便条 6;
最大 如果 增益
−
70 100
µ
V
为 c/n = 10 dB 看 便条 7
−
100 140
µ
V
I
循环
fpll 循环 补偿 电流 在 管脚 6 看 便条 8
−−±
4.5
µ
一个