AD2S80A
rev. 一个
–11–
为 sinusoidal 信号 在 阶段 或者 antiphase 和 这 涉及
(为 一个 正方形的 波 这 demodulator 输出 电压
将 equal 这 demodulator 输入). 这个 提供 一个 sig-
nal 在 这 demodulator 输出 这个 是 一个 直流 水平的
均衡的 至 这 positional 错误 的 这 转换器.
直流 错误 范围调整 = 160 mv/位 (10 位 决议)
= 40 mv/位 (12 位 决议)
= 10 mv/位 (14 位 决议)
= 2.5 mv/位 (16 位 决议)
当 这 追踪 循环 是 关闭, 这个 错误 是 nulled 至 零 un-
较少 这 转换器 输入 角度 是 accelerating.
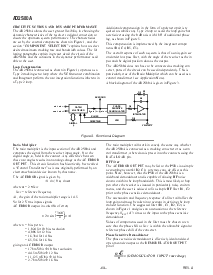
积分器
这 积分器 组件 (r4, c4, r5, c5) 是 外部 至 这
ad2s80a 至 准许 这 用户 至 决定 这 最佳的 动态
特性 为 任何 给 应用. 这 部分 “compo-
nent selection” explains 如何 至 选择 组件 为 一个
选择 带宽.
自从 这 输出 从 这 积分器 是 喂养 至 这 vco 输入,
它 是 均衡的 至 velocity (比率 的 改变 的 输出 角度) 和
能 是 scaled 用 选择 的 r6, 这 vco 输入 电阻. 这个 是
explained 在 这 部分 “voltage 控制 oscil-
lator (vco)” 在下.
至 阻止 这 转换器 从 “flickering” (i.e., continually
toggling 用
±
1 位 当 这 quantized 数字的 角度,
φ
, 是 不 一个
精确的 描述 的 这 输入 角度,
θ
) 反馈 是 内部
应用 从 这 vco 至 这 积分器 输入 至 确保 那 这
vco 将 仅有的 更新 这 计数器 当 这 错误 是 更好 比
或者 equal 至 1 lsb. 在 顺序 至 确保 那 这个 反馈 “hys-
teresis” 是 设置 至 1 lsb 这 输入 电流 至 这 积分器 必须
是 scaled 至 是 100 na/位. 因此,
R
4
=
直流 错误 范围调整
(
mV
/
位
)
100 (
nA
/
位
)
任何 补偿 在 这 输入 的 这 积分器 将 影响 这 精度
的 这 转换 作 它 将 是 treated 作 一个 错误 信号 和 止-
设置 这 数字的 输出. 一个 lsb 的 extra 错误 将 是 增加 为
各自 100 na 的 输入 偏差 电流. 这 方法 的 调整 输出
这个 补偿 是 给 在 这 部分 “component 选择.”
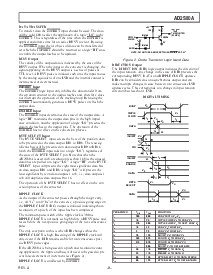
电压 控制 振荡器
(vco)
这 vco 是 essentially 一个 简单的 积分器 feeding 一个 一双 的 直流
水平的 comparators. whenever 这 积分器 输出 reaches 一个
的 这 比较器 门槛 电压, 一个 fixed 承担 是 injected
在 这 积分器 输入 至 balance 这 输入 电流. 在 这
一样 时间 这 计数器 是 clocking 也 向上 或者 向下, 依赖
在 这 极性 的 这 输入 电流. 在 这个 方法 这 计数器 是
clocked 在 一个 比率 均衡的 至 这 巨大 的 这 输入 cur-
rent 的 这 vco.
在 这 重置 时期 这 输入 持续 至 是 整体的, 这
重置 时期 是 常量 在 400 ns.
这 vco 比率 是 fixed 为 一个 给 输入 电流 用 这 vco
范围调整 因素:
= 7.9
kHz
/
µ
一个
这 追踪 比率 在 rps 每
µ
一个 的 vco 输入 电流 能 是
建立 用 dividing 这 vco 范围调整 因素 用 这 号码 的 lsb
改变 每 rev (i.e., 4096 为 12-位 决议).
这 输入 电阻 r6 确定 这 范围调整 在 这 con-
verter velocity 信号 电压 在 这 积分器 输出
管脚 和 这 vco 输入 电流. 因此 至 达到 一个 5 v 输出 在
100 rps (6000 rpm
)
和 12-位 决议 这 vco 输入 cur-
rent 必须 是:
(100
×
4096)/(7900)
=
51.8
µ
一个
因此, r6 将 是 设置 至: 5/(51.8
×
10
–6
) =
96 k
Ω
这 velocity 补偿 电压 取决于 在 这 vco 输入 电阻,
r6, 和 这 vco 偏差 电流 和 是 给 用
velocity 补偿 电压 = r
6
×
(
vco 偏差 电流)
这 温度 系数 的 这个 补偿 是 给 用
velocity 补偿 tempco =
R6
×
(
VCO
偏差 电流 tempco)
在哪里 这 vco 偏差 电流 tempco 是 典型地 –1.22 na/
°
c.
这 最大 推荐 比率 为 这 vco 是 1.1 mhz
这个 sets 这 最大 可能 追踪 比率.
自从 这 最小 电压 摆动 有 在 这 积分器
输出 是
±
8 v, 这个 implies 那 这 最小 值 为 r6 是
57 k
Ω
. 作
最大值 电流
=
1. 1
×
10
6
7. 9
×
10
3
=
139
µ
一个
最小值值 R
6
8
139
×
10
–6
=
57
k
Ω
转移 函数
用 selecting 组件 使用 这 方法 概述 在 这 秒-
tion “component 选择,” 这 转换器 将 有 一个 critically
damped 时间 回馈 和 最大 阶段 余裕. 这
关闭-循环 转移 函数 是 给 用:
θ
输出
θ
在
=
14 (1
+
s
N
)
(
s
N
+
2.4)(
s
N
2
+
3.4
s
N
+
5.8)
在哪里, s
N
, 这 normalized 频率 能变的 是:
s
N
=
2
π
s
f
BW
和
f
BW
是 这 关闭-循环 3 db 带宽 (选择 用 这
选择 的 外部 组件).
这 acceleration k
一个
,
是 给 大概 用
K
一个
=
6
×
(
f
BW
)
2
秒
–2
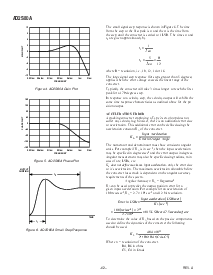
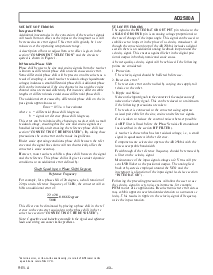
这 normalized 增益 和 阶段 图解 是 给 在 计算数量 4
和 5.