AM26LS30
3
motorola 相似物 ic 设备 数据
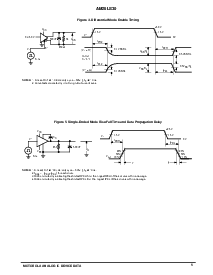
定时 特性
(eia–422–a 差别的 模式, 管脚 4
p
0.8 v, t
一个
= 25
°
c, v
CC
= 5.0 v, v
EE
= 地, (注释 1 和 3)
除非 否则 指出.)
典型的
标识 最小值 典型值 最大值 单位
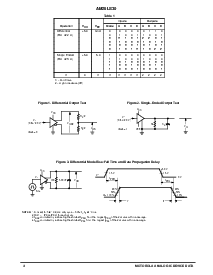
差别的 输出 上升 时间 (图示 3) t
r
– 70 200 ns
差别的 输出 下降 时间 (图示 3) t
f
– 70 200 ns
传播 延迟 时间 – 输入 至 差别的 输出
输入 低 至 高 (图示 3)
输入 高 至 低 (图示 3)
t
PDH
t
PDL
–
–
90
90
200
200
ns
skew 定时 (图示 3)
t
PDH
至 t
PDL
为 各自 驱动器
最大值 至 最小值 t
PDH
在里面 一个 包装
最大值 至 最小值 t
PDL
在里面 一个 包装
t
SK1
t
SK2
t
SK3
–
–
–
9.0
2.0
2.0
–
–
–
ns
使能 定时 (图示 4)
使能 至 起作用的 高 差别的 输出
使能 至 起作用的 低 差别的 输出
使能 至 3–state 输出 从 起作用的 高
使能 至 3–state 输出 从 起作用的 低
t
PZH
t
PZL
t
PHZ
t
PLZ
–
–
–
–
150
190
80
110
300
350
350
300
ns
电的 特性
(eia–423–a single–ended 模式, 管脚 4
q
2.0 v, –40
°
C
t
T
一个
t
85
°
c, 4.75 v
p
V
CC
,
|V
EE
p
5.25 v, (注释 1 和 3) 除非 否则 指出).
典型的
标识 最小值 典型值 最大值 单位
输出 电压 (v
CC
=
V
EE
= 4.75 v)
single–ended 电压, r
L
=
∞
(图示 2)
single–ended 电压, r
L
= 450
Ω
, (图示 2)
电压 imbalance (便条 5), r
L
= 450
Ω
V
O1
V
O2
∆
V
O2
4.0
3.6
–
4.2
3.95
0.05
6.0
6.0
0.4
Vdc
回转 控制 电流 (管脚 16, 13, 12, 9) I
回转
–
±
120 –
µ
一个
输出 电流 (各自 输出)
电源 止 泄漏, v
CC
= v
EE
= 0, –6.0 v
p
V
O
p
+6.0 v
短的 电路 电流 (输出 短的 至 地面, 便条 2)
V
在
p
0.8 v (t
一个
= 25
°
c)
V
在
p
0.8 v (–40
°
C
t
T
一个
t
+85
°
c)
V
在
w
2.0 v (t
一个
= 25
°
c)
V
在
w
2.0 v (–40
°
C
t
T
一个
t
+85
°
c)
I
OLK
I
SC+
I
SC+
I
SC–
I
SC–
–100
60
50
–150
–150
0
80
–
–95
–
+100
150
150
–60
–50
µ
一个
毫安
输入
低 水平的 电压
高 水平的 电压
电流 @ v
在
= 2.4 v
电流 @ v
在
= 15 v
电流 @ v
在
= 0.4 v
电流, 0
p
V
在
p
15 v, v
CC
= 0
clamp 电压 (i
在
= –12 毫安)
V
IL
V
IH
I
IH
I
IHH
I
IL
I
IX
V
IK
–
2.0
–
–
–200
–
–1.5
–
–
0
0
–8.0
0
–
0.8
–
40
100
–
–
–
Vdc
Vdc
µ
一个
Vdc
电源 供应 电流 (输出 打开)
V
CC
= +5.25 v, v
EE
= –5.25 v, v
在
= 0.4 v
I
CC
I
EE
–
–22
17
–8.0
30
–
毫安
定时 特性
(eia–423–a single–ended 模式, 管脚 4
q
2.0 v, t
一个
= 25
°
c, v
CC
= 5.0 v, v
EE
= –5.0 v, (注释 1 和 3)
除非 否则 指出.)
典型的
标识 最小值 典型值 最大值 单位
输出 定时 (图示 5)
输出 上升 时间, c
C
= 0
输出 下降 时间, c
C
= 0
输出 上升 时间, c
C
= 50 pf
输出 下降 时间, c
C
= 50 pf
t
r
t
f
t
r
t
f
–
–
–
–
65
65
3.0
3.0
300
300
–
–
ns
µ
s
上升 时间 系数 (图示 16) C
rt
– 0.06 –
µ
s/pf
传播 延迟 time, 输入 至 单独的 结束 输出 (图示 5)
输入 低 至 高, c
C
= 0
输入 高 至 低, c
C
= 0
t
PDH
t
PDL
–
–
100
100
300
300
ns
skew 定时, c
C
= 0 (图示 5)
t
PDH
至 t
PDL
为 各自 驱动器
最大值 至 最小值 t
PDH
在里面 一个 包装
最大值 至 最小值 t
PDL
在里面 一个 包装
t
SK4
t
SK5
t
SK6
–
–
–
15
2.0
5.0
–
–
–
ns