6 agere 系统 公司
数据 薄板
october 2001
btk1a 和 btm1a
双 差别的 transceivers
定时 特性
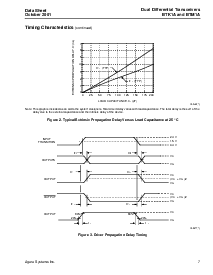
表格 6. 驱动器 定时 特性
(看 图示 3 和 图示 4.)
为 t
P1
和 t
P2
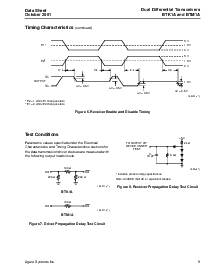
传播 延迟 在 这 温度 范围, 看 图示 13. 传播 延迟 测试 电路
连接 至 输出 是 显示 在 图示 7. t
一个
=
−
40
°
c 至 +125
°
c, v
CC
= 5 v
±
0.5 v.
* tp1 和 tp2 是 量过的 从 这 1.5 v 要点 的 这 输入 至 这 转型 要点 的 这 输出 (看 图示 3).
†
cl = 5 pf. 电容 是 连接 从 各自 输出 至 地面.
表格 7. 接受者 定时 特性
(看 图示 5 和 图示 6.)
为 传播 延迟 (t
PLH
和 t
PHL
) 在 这 温度 范围, 看 图示 14 和 图示 15. 传播 延迟
测试 电路 连接 至 输出 是 显示 在 图示 8. t
一个
=
−
40
°
c 至 +125
°
c, v
CC
= 5 v
±
0.5 v.
参数 标识 最小值 典型值 最大值 单位
传播 延迟:
输入 高 至 输出
†
t
P1
*
0.8 1.2 2.0 ns
输入 低 至 输出
†
t
P2
*
0.8 1.2 2.0 ns
电容的 延迟
∆
t
p
—
0.02 0.03 ns/pf
使不能运转 时间 (也 e1 或者 e2):
高-至-高 阻抗 t
PHZ
4812ns
低-至-高 阻抗 t
PLZ
4812ns
使能 时间 (也 e1 或者 e2):
高 阻抗 至 高 t
PZH
4812ns
高 阻抗 至 低 t
PZL
4812ns
输出 skew:
|t
P1
–
t
P2
|t
skew1
—
0.1 0.3 ns
|t
PHH
–
t
PHL
|, |t
PLH
–
t
PLL
|t
skew2
—
0.2 0.5 ns
区别 在 驱动器
∆
t
skew
——
0.3 ns
上升 时间 (20%
—
80%) t
tLH
—
0.7 2 ns
下降 时间 (80%
—
20%) t
tHL
—
0.7 2 ns
参数 标识 最小值 典型值 最大值 单位
传播 延迟:
输入 至 输出 高 t
PLH
1.5 2.5 4.0 ns
输入 至 输出 低 t
PHL
1.5 2.5 4.0 ns
脉冲波 宽度 扭曲量, ltphl-tplhi:
加载 电容 (c
L
) = 15 pf tskew1
——
0.7 ns
加载 电容 (c
L
) = 150 pf tskew1
——
4.0 ns
输出 波形 skews:
部分-至-部分 skew, t
一个
= 75
°
C
∆
tskew1p-p
—
0.8 1.4 ns
部分-至-部分 skew, t
一个
=
–
40
°
c 至 +125
°
C
∆
tskew1p-p
——
1.5 ns
一样 部分 skew
∆
tskew
——
0.3 ns
使不能运转 时间, c
L
= 5 pf:
高-至-高 阻抗 t
PHZ
—
512ns
低-至-高 阻抗 t
PLZ
—
512ns
使能 时间:
高 阻抗 至 高 t
PZH
—
812ns
高 阻抗 至 低 t
PZL
—
812ns
上升 时间 (20%
—
80%) t
tLH
——
3.0 ns
下降 时间 (80%
—
20%) t
tHL
——
3.0 ns