µ
pd6124a, 6600a
8
10. 计时器
这 计时器 块 确定 这 传递 输出 模式. 这 计时器 组成 的 10 位, 的 这个 9 位 提供 作
这 9-位 向下 计数器 和 这 remaining 1 位 serves 作 这 1-位 获得, 这个 确定 这 运输车 输出 validity.
这 9-位 向下 计数器 是 decremented (–1) 每 8/f
OSC
(s) 在 同步 和 这 机器 循环, 之后 开始
向下 计数 运作. 向下 counting stops 之后 所有 的 这 9 位 变为 0. 当 向下 counting 是 stopped, 这 信号
表明 那 这 计时器 运作 有 stopped, 是 输出. 如果 这 cpu 是 在 备用物品 (halt 计时器) 为 这 计时器 运作
completion, 这 备用物品 (halt) 情况 是 released 和 这 next 操作指南 将 是 executed. 如果 这 next 操作指南
又一次 sets 这 值 的 这 向下 计数器, 向下 counting 持续 没有 任何 错误 (这 运输车 输出 的 这 rem 管脚
是 不 影响).
设置 这 向下 计数 时间 符合 至 这 下列的 计算; (设置 值 (十六进制) + 1)
×
8/f
OSC
. 设置 这 值 至
这 计时器 是 完毕 用 这 计时器 manipulation 操作指南.
当 这 向下 计数器 是 运行, 这 偏远的 控制 传递 运输车 能 是 输出 至 这 rem 管脚. whether
或者 不 至 输出 这 运输车 能 是 选择 用 这 msb 为 这 计时器 寄存器 块. 设置 “1”, 当 outputting 这 运输车,
或者 “0”, 当 不 outputting 这 运输车.
如果 所有 这 向下 计数器 位 变为 “0”, 当 outputting 这 运输车, 这 运输车 输出 将 是 stopped. 当 不
outputting 这 运输车, 这 rem 管脚 输出 将 变为 低 水平的.
一个 信号 在 同步 和 这 rem 输出 是 输出 至 这 s-输出 管脚. 不管怎样, 这 波形 为 这 s-输出
管脚 是 低, 当 这 运输车 是 正在 输出 至 这 rem 管脚, 或者 它 是 高, 当 这 运输车 是 不 正在 输出 至 这 rem
管脚.
如果 这 halt 操作指南, 这个 initiates 这 振动 停止 模式, 是 executed 当 这 向下 计数器 是 运行,
这 振动 停止 模式 是 initiated 之后 向下 counting 是 stopped (之后 0).
计时器 运作 停止/run 是 控制 用 这 控制 寄存器 (p
1
). (谈及 至
13. 控制 寄存器 (p
1
)
.)
在 重置 (所有 clear) 时间, 这 rem 管脚 变得 低 和 s-输出 管脚 变得 high. 所有 10 位 的 这 计时器 是 cleared 至 000h.
Cautions 1. 因为 这 计时器 时钟 是 不 同步 和 这 运输车 输出, 这 脉冲波 宽度 将 是
shortened 在 这 beginning 和 终止 的 这 运输车 输出.
2. 重置 造成 用 这 低-电压 探测器 电路 导致 这 s-输出 管脚 至 输出 低 水平的.
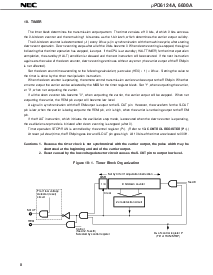
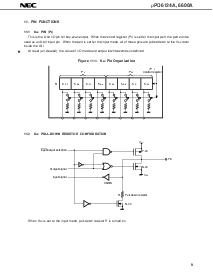
图示 10-1. 计时器 块 organization
从 低-电压
探测器 (重置)
电路
s-输出
REM
运输车
(fosc/12, fosc/8)
选择 用 控制 寄存器
Clear
设置 用 计时器 mainpulation 操作指南
9-位 向下 计数器
零 发现 电路
d 的 控制 寄存器 p
(计时器 run/停止)
21
1/0
MSB
fosc/8