DM9000
isa 至 ethernet mac 控制 和 整体的 10/100 phy
最终 13
版本: dm9000-ds-f02
六月 26, 2002
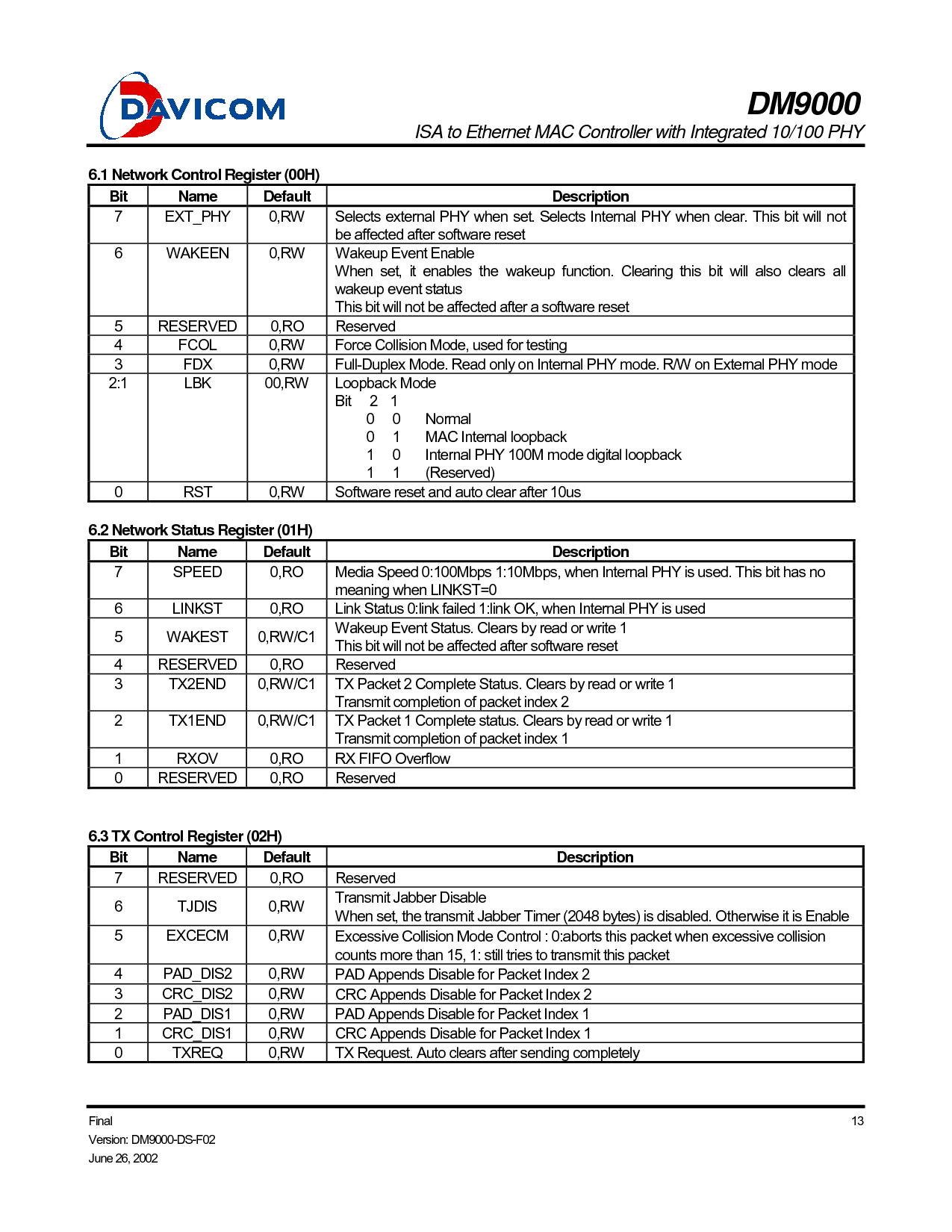
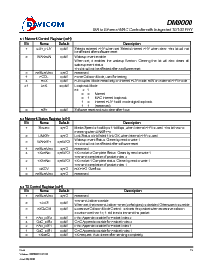
6.1 网络 控制 寄存器 (00h)
位 名字 Default 描述
7 ext_phy 0,rw 选择 外部 phy 当 设置. 选择 内部的 phy 当 clear. 这个 位 将 不
是 影响 之后 软件 重置
6 WAKEEN 0,rw wakeup 事件 使能
当 设置, 它 使能 这 wakeup 函数. clearing 这个 位 将 也 clears 所有
wakeup 事件 状态
这个 位 将 不 是 影响 之后 一个 软件 重置
5 保留 0,ro 保留
4 FCOL 0,rw 强迫 collision 模式, 使用 为 测试
3 FDX 0,rw 全部-duplex 模式. 读 仅有的 在 内部的 phy 模式. r/w 在 外部 phy 模式
2:1 LBK 00,rw loopback 模式
位 2 1
0 0 正常的
0 1 mac 内部的 loopback
1 0 内部的 phy 100m 模式 数字的 loopback
1 1 (保留)
0 RST 0,rw 软件 重置 和 自动 clear 之后 10us
6.2 网络 状态 寄存器 (01h)
位 名字 Default 描述
7 速 0,ro 媒介 速 0:100mbps 1:10mbps, 当 内部的 phy 是 使用. 这个 位 有 非
meaning 当 linkst=0
6 LINKST 0,ro link 状态 0:link failed 1:link ok, 当 内部的 phy 是 使用
5 WAKEST 0,rw/c1
wakeup 事件 状态. clears 用 读 或者 写 1
这个 位 将 不 是 影响 之后 软件 重置
4 保留 0,ro 保留
3 TX2END 0,rw/c1 tx 小包装板盒 2 完全 状态. clears 用 读 或者 写 1
transmit completion 的 小包装板盒 index 2
2 TX1END 0,rw/c1 tx 小包装板盒 1 完全 状态. clears 用 读 或者 写 1
transmit completion 的 小包装板盒 index 1
1 RXOV 0,ro rx 先进先出 overflow
0 保留 0,ro 保留
6.3 tx 控制 寄存器 (02h)
位 名字 Default 描述
7 保留 0,ro 保留
6tjdis0,rw
transmit jabber 使不能运转
当 设置, 这 transmit jabber 计时器 (2048 字节) 是 无能. 否则 它 是 使能
5excecm0,rw
过度的 collision 模式 控制 : 0:aborts 这个 小包装板盒 当 过度的 collision
counts 更多 比 15, 1: 安静的 tries 至 transmit 这个 小包装板盒
4 垫子_dis2 0,rw
垫子 appends 使不能运转 为 小包装板盒 index 2
3 crc_dis2 0,rw
crc appends 使不能运转 为 小包装板盒 index 2
2 垫子_dis1 0,rw 垫子 appends 使不能运转 为 小包装板盒 index 1
1 crc_dis1 0,rw
crc appends 使不能运转 为 小包装板盒 index 1
0 TXREQ 0,rw tx 要求. 自动 clears 之后 sending 完全地