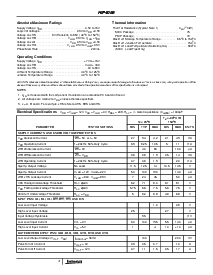
2
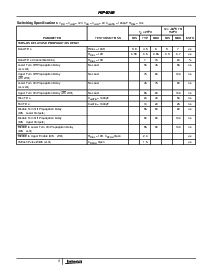
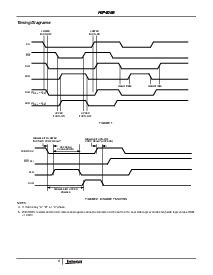
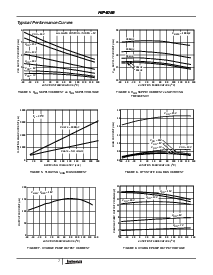
HIP4086
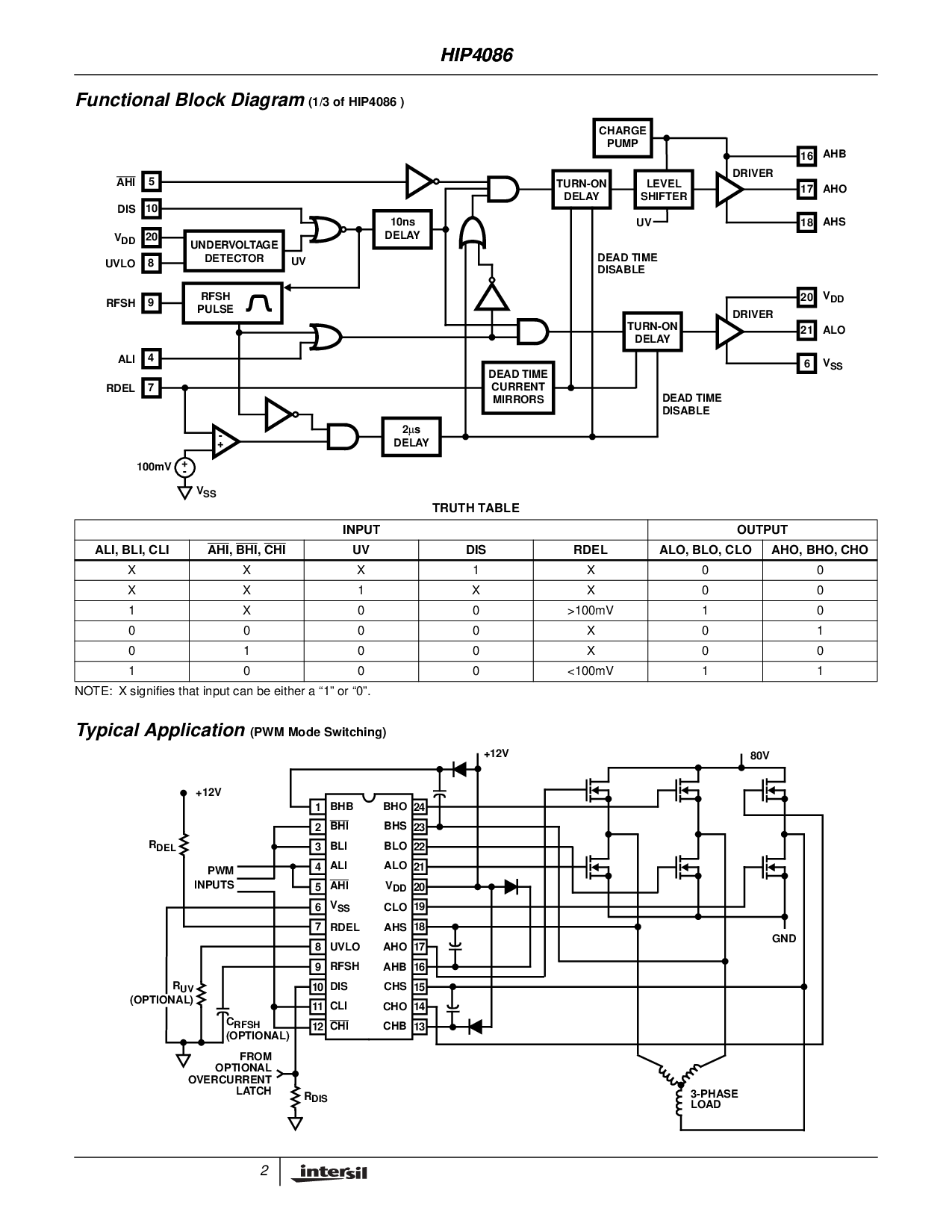
函数的 块 图解
(1/3 的 hip4086 )
典型 应用
(pwm 模式 切换)
真实 表格
输入 输出
ali, bli, cli
ahi, bhi, CHI UV DIS RDEL alo, blo, clo aho, bho, cho
XXX1X00
XX1XX00
1 X 0 0 >100mv 1 0
0000X01
0100X00
1 0 0 0 <100mv 1 1
便条: x signifies 那 输入 能 是 也 一个 “1” 或者 “0”.
承担
打气
V
DD
DIS
ALI
UVLO
AHB
AHO
AHS
UV
20
8
AHI
5
10ns
延迟
10
欠压
探测器
RFSH
9
RFSH
脉冲波
4
水平的
SHIFTER
转变-在
延迟
驱动器
16
17
18
转变-在
延迟
V
DD
ALO
V
SS
驱动器
20
21
6
dead 时间
电流
MIRRORS
7
RDEL
2
µ
s
延迟
+
-
100mV
+
-
V
SS
dead 时间
使不能运转
dead 时间
使不能运转
UV
80V
+12V
PWM
输入
C
RFSH
R
DIS
从
OPTIONAL
OVERCURRENT
获得
R
DEL
3-阶段
加载
地
1
2
3
4
5
6
7
8
9
10
11
12
16
17
18
19
20
21
22
23
24
15
14
13
BHB
BHI
AHI
BLI
ALI
V
SS
AHB
BHO
BLO
ALO
BHS
V
DD
AHS
AHO
DIS
RFSH
CHI
UVLO
CLI
CHO
CHB
CLO
CHS
RDEL
(optional)
R
UV
(optional)
+12V
HIP4086