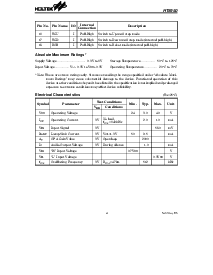
函数的 描述
这 ht8950 是 一个 单独的 碎片 lsi 设计 为
voice 调制. 它 提供 7 步伐 至 变换 这
频率 的 一个 输入 voice 信号 向上 和 向下.
这 碎片 是 也 配备 和 二 特定的 ef-
fects; vibrato 和 robot.
这 ht8950 包含 一个 建造-在 放大器, 8-位
一个/d 转换器 和 电流 输出 类型 的 8-位
d/一个 转换器 在 增加 至 一个 建造-在 sram.
这 明亮 的 一个 led 指示信号 改变
和 这 容积 的 这 输入 voice 信号.
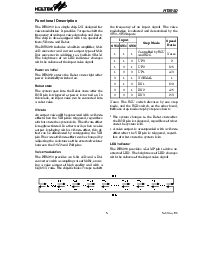
电源 在 最初的
这 ht8950 enters 这 robot 状态 正确的 之后
电源 是 initially 切换 在.
robot 状态
这 系统 变得 在 这 robot 状态 之后 这
rob 管脚 是 triggered 或者 电源 是 转变 在. 在
这个 模式, 一个 输入 voice 能 是 转变 在
一个 robot voice.
Vibrato
一个 输出 voice 将 是 发生 和 一个 vibrato
效应 当 这 vib 管脚 是 triggered, regardless
的 what 状态 这 系统 是 在. 这 vibrato 效应
是 toggle 使活动. 在 其它 words, 当 一个 voice
输出 是 playing 和 一个 vibrato 效应, 这个 ef-
fect 能 是 eliminated 用 retriggering 这 vib
管脚. 这 比率 的 vibrato 效应 能 是 changed 用
调整 这 阻抗 的 这 外部 电阻
在 这 osc2 和 fvil 管脚.
voice 调制
这 ht8950 提供 一个 8-位 一个/d 和 一个 d/一个
转换器 和 一个 抽样 比率 的 8khz, ensur-
ing 一个 voice 输出 的 高 质量 和 和 一个
高 s/n 比率. 这 碎片 包含 7 步伐 至 变换
这 频率 的 一个 输入 信号. 这 voice
调制 是 选择 和 决定 用 这
sw0~sw2 输入.
输入
步伐 模式
速
比率
SW2 SW1 SW0
111
控制 用 tgu
和 tdg
注释
1 1 0 UP3 2
1 0 1 UP2 8/5
1 0 0 UP1 4/3
011NORMAL 1
0 1 0 DN1 8/9
0 0 1 DN2 4/5
0 0 0 DN3 2/3
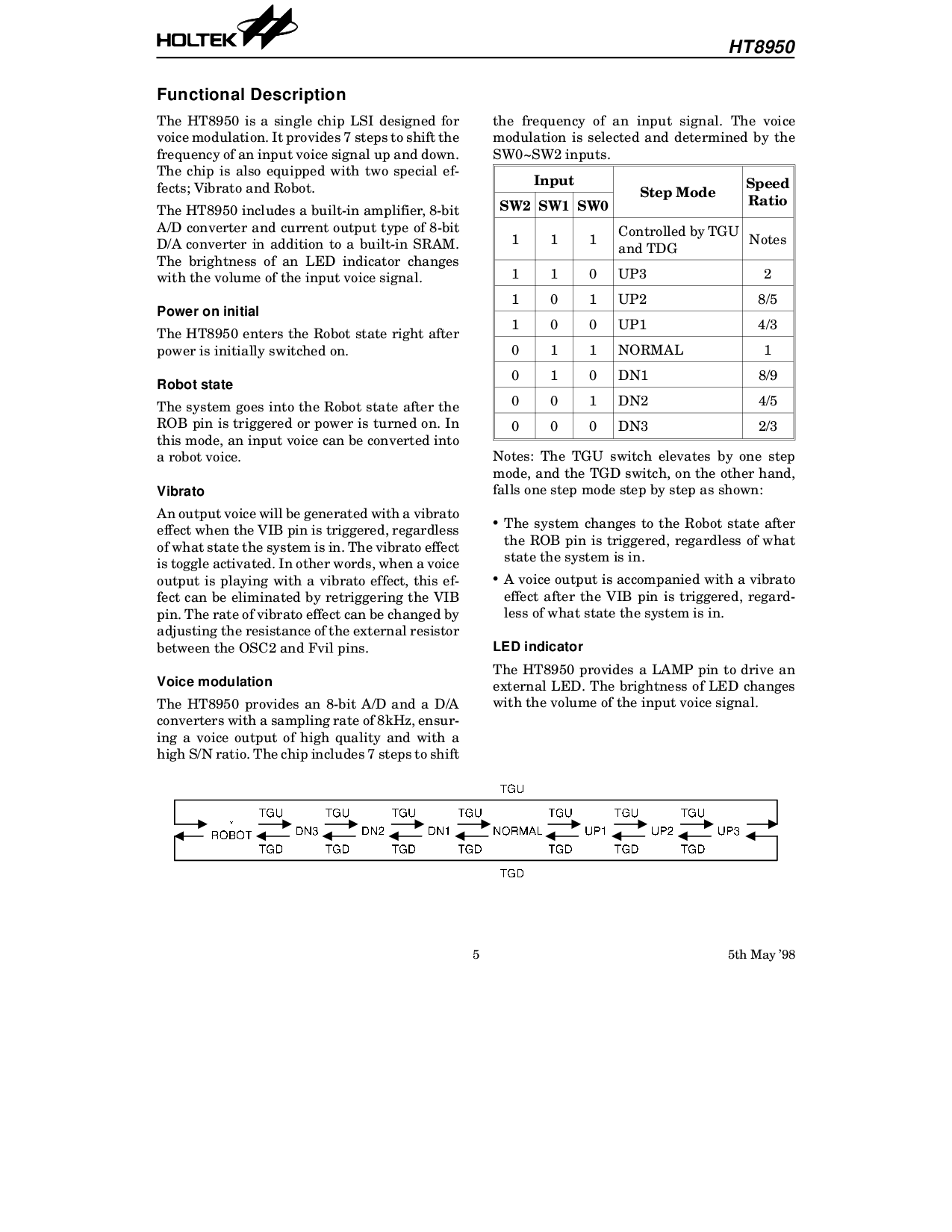
注释: 这 tgu 转变 elevates 用 一个 步伐
模式, 和 这 tgd 转变, 在 这 其它 hand,
falls 一个 步伐 模式 步伐 用 步伐 作 显示:
•
这 系统 改变 至 这 robot 状态 之后
这 rob 管脚 是 triggered, regardless 的 what
状态 这 系统 是 在.
•
一个 voice 输出 是 陪同 和 一个 vibrato
效应 之后 这 vib 管脚 是 triggered, 关于-
较少 的 what 状态 这 系统 是 在.
led 指示信号
这 ht8950 提供 一个 lamp 管脚 至 驱动 一个
外部 led. 这 明亮 的 led 改变
和 这 容积 的 这 输入 voice 信号.
HT8950
5 5th 将 ’98