L6235
12/25
慢 decay 模式
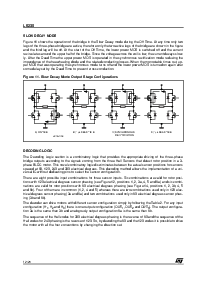
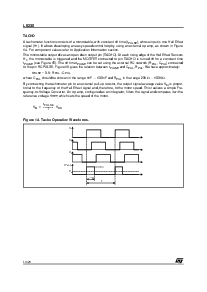
图示 11 显示 这 运作 的 这 桥 在 这 慢 decay 模式 在 这 止 时间. 在 任何 时间 仅有的 二
legs 的 这 三-阶段 桥 是 起作用的, 因此 仅有的 这 二 起作用的 legs 的 这 桥 是 显示 在 这 图示
和 这 第三 leg 将 是 止. 在 这 开始 的 这 止 时间, 这 更小的 电源 mos 是 切换 止 和 这 电流
recirculates 周围 这 upper half 的 这 桥. 自从 这 电压 横过 这 coil 是 低, 这 电流 decays 慢-
ly. 之后 这 dead 时间 这 upper 电源 mos 是 运作 在 这 同步的 整流 模式 减少 这
impendence 的 这 freewheeling 二极管 和 这 related 组织 losses. 当 这 monostable 时间 输出, 向上-
每 mos 那 是 运行 这 同步的 模式 转变 止 和 这 更小的 电源 mos 是 转变 在 又一次 之后
一些 延迟 设置 用 这 dead 时间 至 阻止 交叉 传导.
图示 11. 慢 decay 模式 输出 平台 配置
解码 逻辑
这 解码 逻辑 部分 是 一个 combinatory 逻辑 那 提供 这 适合的 驱动 的 这 三-阶段
桥 输出 符合 至 这 信号 coming 从 这 三 通道 传感器 那 发现 rotor 位置 在 一个 3-
阶段 bldc 发动机. 这个 novel combinatory 逻辑 discriminates 在 这 真实的 传感器 positions 为 传感器
排列 在 60, 120, 240 和 300 电的 degrees. 这个 解码 方法 准许 这 implementation 的 一个 uni-
versal ic 没有 dedicating 管脚 至 选择 这 传感器 配置.
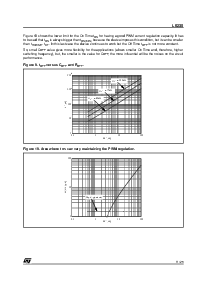
那里 是 第八 可能 输入 结合体 为 三 传感器 输入. 六 结合体 是 有效的 为 rotor posi-
tions 和 120 电的 degrees 传感器 phasing (看 图示 12, positions 1, 2, 3a, 4, 5 和 6a) 和 六 combi-
nations 是 有效的 为 rotor positions 和 60 电的 degrees phasing (看 图示 14, positions 1, 2, 3b, 4, 5
和 6b). 四 的 它们 是 在 一般 (1, 2, 4 和 5) whereas 那里 是 二 结合体 使用 仅有的 在 120 elec-
trical degrees 传感器 phasing (3a 和 6a) 和 二 结合体 使用 仅有的 在 60 电的 degrees 传感器 phas-
ing (3b 和 6b).
这 解码器 能 驱动 发动机 和 不同的 传感器 配置 simply 用 下列的 这 表格 2. 为 任何 输入
配置 (h
1
, h
2
和 h
3
) 那里 是 一个 输出 配置 (输出
1
, 输出
2
和 输出
3
). 这 输出 configura-
tion 3a 是 这 一样 比 3b 和 analogously 输出 配置 6a 是 这 一样 比 6b.
这 sequence 的 这 通道 代号 为 300 电的 degrees phasing 是 这 反转 的 60 和 这 sequence 的 这
通道 代号 为 240 phasing 是 这 反转 的 120. 所以, 用 解码 这 60 和 这 120 代号 它 是 可能 至 驱动
这 发动机 和 所有 这 四 conventions 用 changing 这 方向 设置.
一个) 在 时间 b) 1
µ
s dead 时间 c) 同步的
整流
d) 1
µ
s dead 时间
D01IN1336